

协作关节模组核心部件-制动器设计
一、 制动器简介
制动器应用范围非常的广泛:伺服电机、工业机器人、新能源电动车型自动门等领域都有应用。制动系统主要有五大类型:液压制动、气压制动、电磁式制动、磁粉制动以及张力控制与纠偏控制系统。
机器人领域的制动器一般都采用电磁式制动器其特点:具有体积小、重量轻、结构紧凑、操作方便、安装简单、高频动作、安全可靠、耐用、维护方便以及易于实现远距离操作等特点。多个压力弹簧在断电情况下通过摩擦力产生制动扭矩,通过电磁吸力释放。
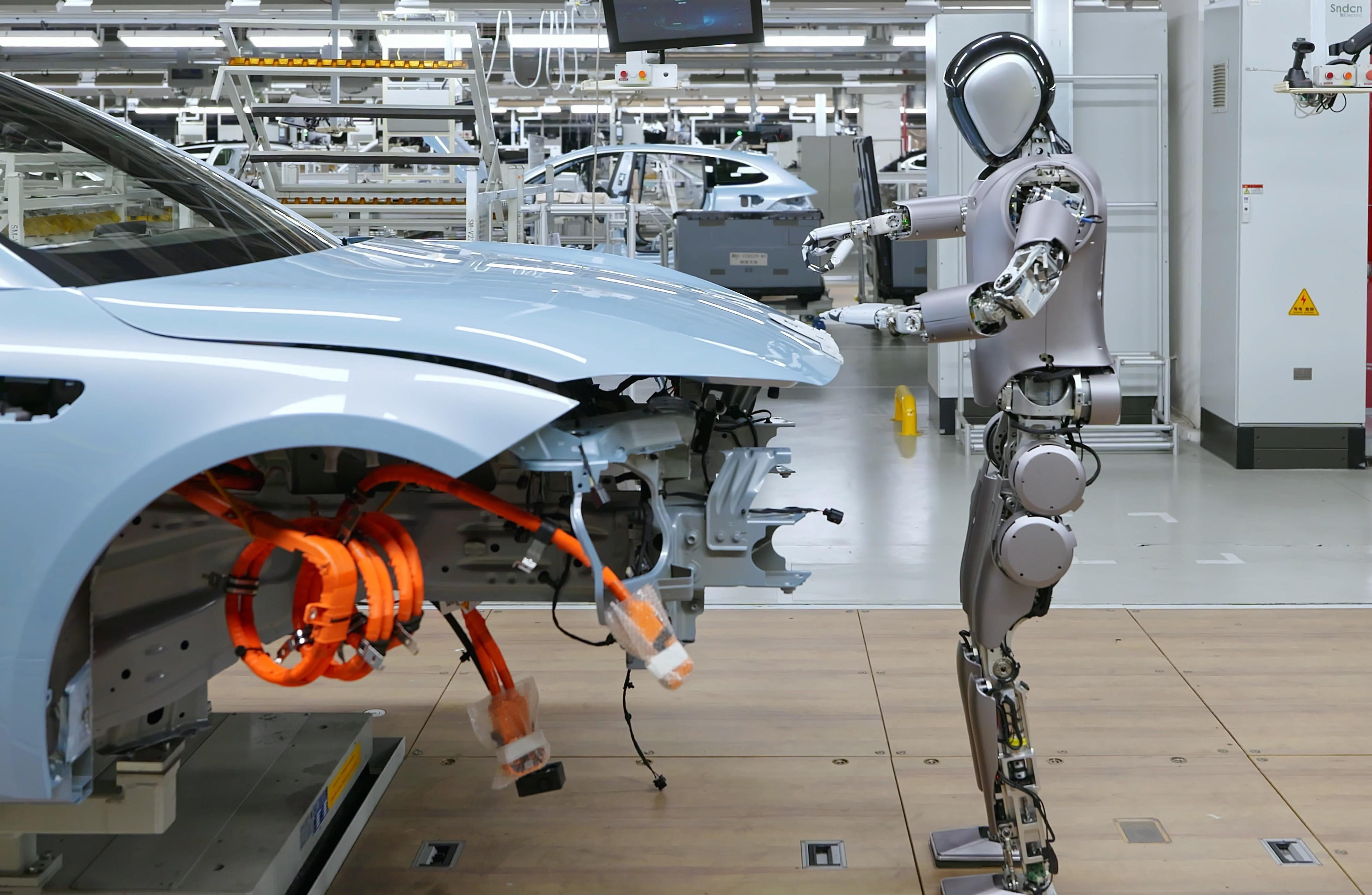
二、 协作机器人中的制动设计
协作机器人的制动大概粉三类:动态制动、外加泄放电阻的再生制动、外加抱闸的机械制动这些概念、用途、亦即实现方法是各自不同的。
动态制动的目的是迅速释放轴的动能,令轴运动尽快停止,内部有消耗制动能量的电阻,小功率电机也有简单利用绕组电阻的;再生制动的目的是泄放反充到直流母线的发电能量,令直流母线处于安全电压范围,需使用内置或外置的功率泄放电阻,小功率一般用电容。抱闸机械制动的目的在于仿制垂直轴掉电坠落,或者下电后轴位置保持,除非紧停,一般不用作刹车。电磁刹车是一种外加装置,类似于离合器,在协作机器人中起到停机后的力矩保持作用,俗称“抱轴”,一般不主张用于制动过程。

协作机器人中的制动设计主要考虑方向:
l 协作机器人的停止类型
l 电磁制动器设计:制动器结构类型、制动扭矩、制动器控制方案、制动器设计
l 动态制动器设计:能量回收电容
1、协作机器人的停机类型
协作机器人如何停下来,根据具体情况,机器人可以启动三种根据 IEC 60204-1 定义的停机类别。这些类别在下表中定义。
0类停机:系统将直接切断所有供电,机器人停机主要是靠电磁制动的摩擦力停止机械臂的惯性运动。
1类停机:以有序、受控的方式停机,电磁制动器和动态制动器将停止机械臂的惯性运动,停机后断电。
(动态制动器:通过能耗制动缩短电机的机械进给距离。电磁制动是通过机械装置锁住电机的轴。
2类停机:用伺服系统控停机器人
安全系统通过监视是否违反任何安全限制或者是否启动了紧急停止或防护停止来起作用。
安全系统的反应有:
2、电磁制动器设计
l 制动器结构类型
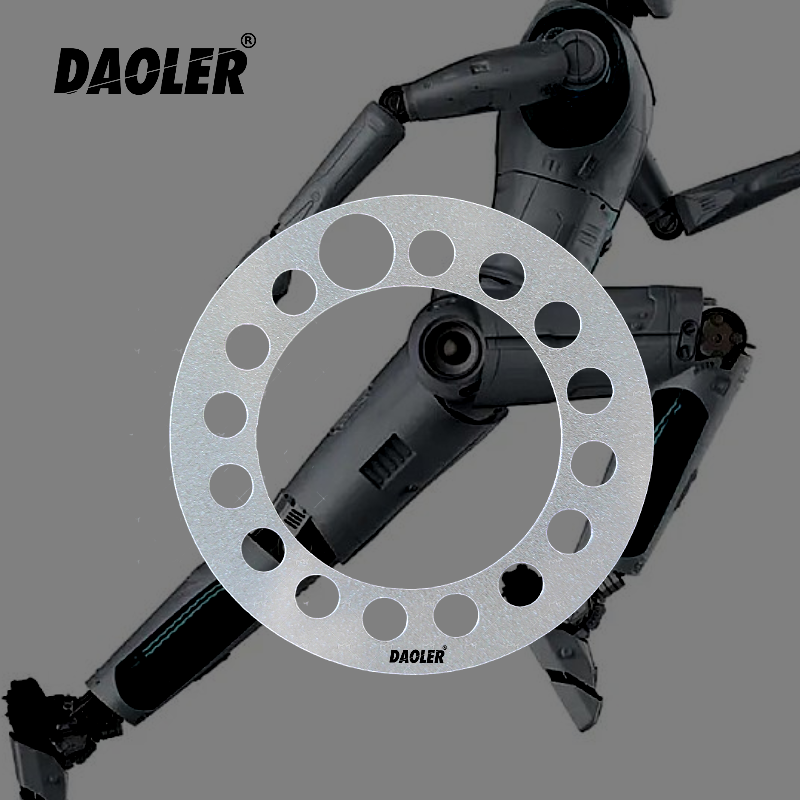
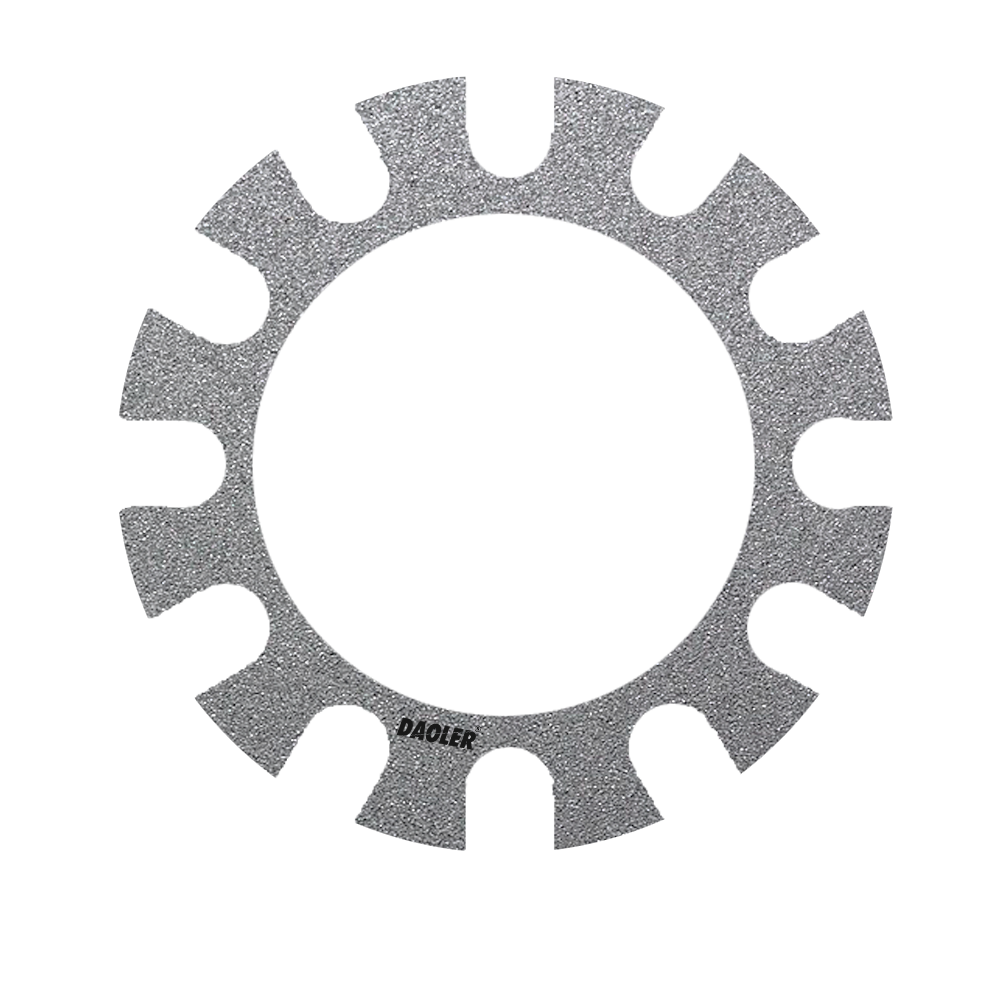
第一种:UR与节卡采用的是插销式如下图,5星型挡片加一个插销继电器,电机端分度为360/5=72°。通过减速比100后变为0.72°可移动空间。此类型结构的优点:1、结构简单,重量轻,占用空间小;2、无摩擦粉尘,有利于采用光学编码器不容易被污染。缺点也很明显:1、整个手停机后会有一定的虚位可移动,让人感觉机械手不够稳固,机器人启动比较麻烦,容易出现制动器解不开的可能,需要控制机器人反向旋转一定角度后,再松开制动器。
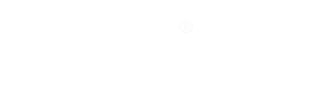
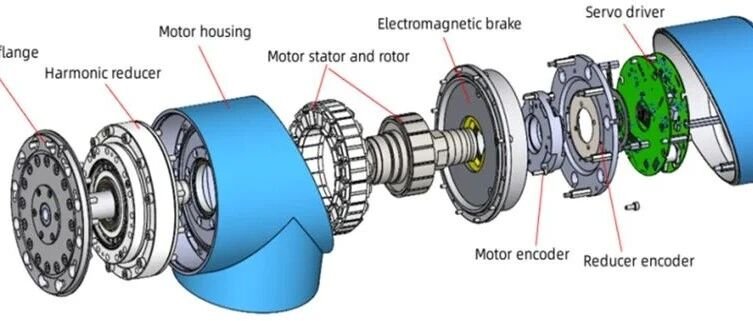
第二种:大多数厂商采用的是摩擦式制动器,工作原理如下。此类型结构的有点:1、机械手启停后无虚位。可以比较好的保护末端设备。缺点也很明显:1、重量大,启动有声音;2、容易有摩擦粉尘,需要密封处理。
l 制动扭矩
协作机器人制动扭矩的大小设计并不是完全参考与电机的额定扭矩,也并不是制动扭矩越大越好,一般小于谐波的启停扭矩,比如采用14和减速比100的谐波,那么制动扭矩要小于0.28Nm,不然在急停断电的情况下,如果制动扭矩太大容易造成减速机损坏或者关节偏移。制动扭矩也不是越小越好,制动器不仅仅有减速的作用,还有断电保持姿态以免撞击末端执行器的作用,所以最小扭矩建议大于重力距的2倍,以UR3机械臂来说,负载3kg的情况下,J4轴的扭矩大约5Nm,所以制动扭矩最小值建议为10Nm,对于减速比100后,得到的最小制动扭矩大概为0.1Nm,综上所述建议14型号减速比100的谐波的扭矩大概去到0.15Nm比较合适。
l 制动器控制方案
通过PWM降压电路控制过励磁输出电压和通常励磁输出,电流采样电阻可要可不要,但是建议保留,主要有两个作用,1、可以控制环路电流输出;2、有电流反馈,可以检测电流输出,如果出现异常(比如断线)至少有个反馈,避免开环盲控。控制的逻辑如下图。
l 制动器设计
设计主要考虑的变量有:1、摩擦片材料的摩擦系数;2、转矩弹簧的选择;3、电磁铁电磁设计
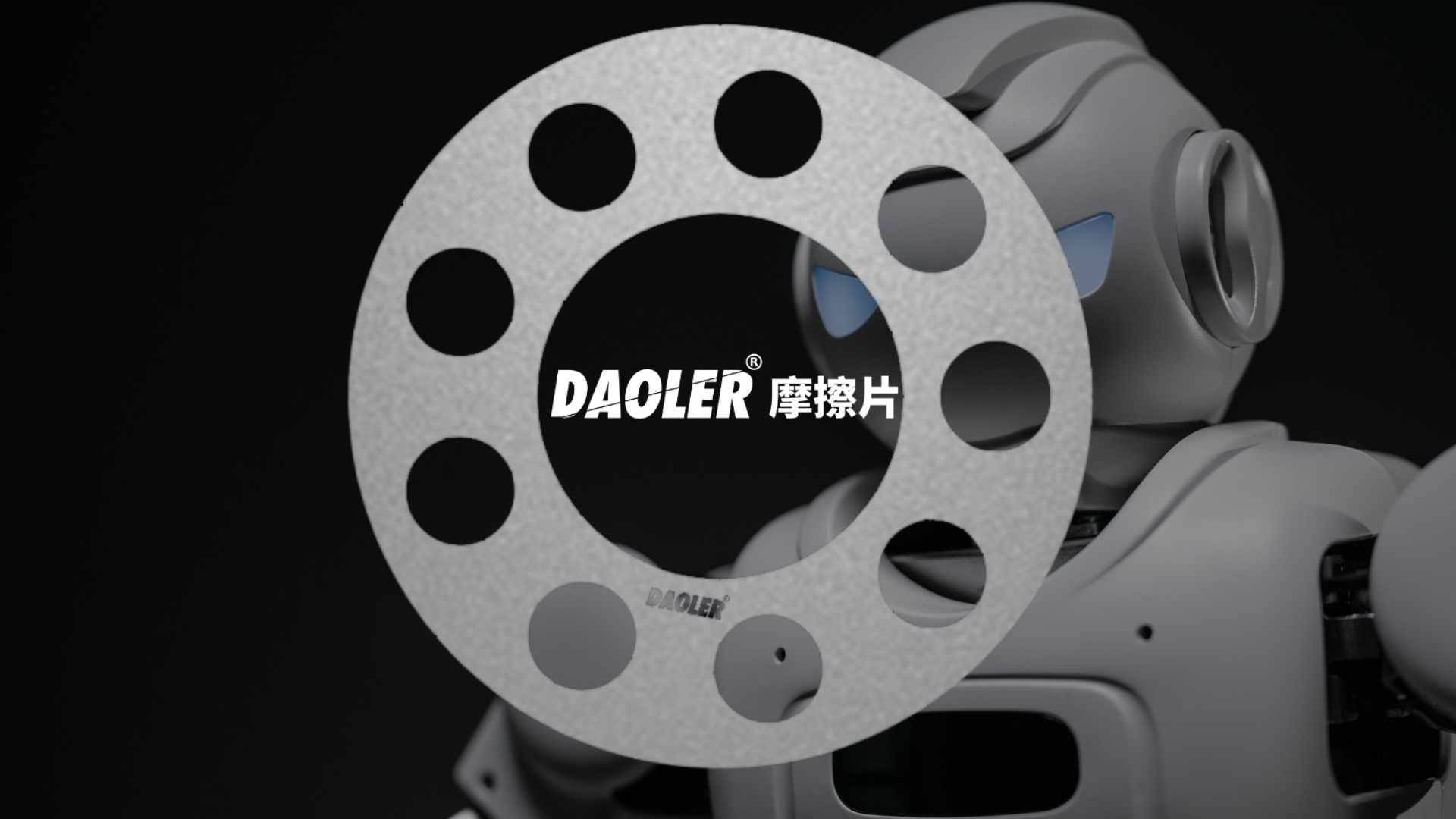
1、 摩擦片材料的摩擦系数
目前市面上的摩擦片产品主要采用复合棉、金属纤维为基材,加粘结剂和粉状填料以及调节剂、配合剂等物料混合经一系列生产加工而制成的产品。大部分厂商配方都不会公开,并且不同材料之间摩擦系数也不一样,具体的摩擦系数确定方案,最好参考国标的GB∕T 10006-2021塑料薄膜和片材摩擦系数的测定进行试验。根据相关的测试结果,目前摩擦片与钢材之间的摩擦系数大概在0.2~0.3之间,设计取0.25。
2、转矩弹簧的选择
根据需要的扭矩0.15Nm与材料的摩擦系数0.25和摩擦半径15mm就能推算出需要的弹簧压力值F=0.15/(2*0.015*0.25)=20N,此设计取4个弹簧,所以每个弹簧大概5N。由于空间限制弹簧长度也不能太长,最好在10mm以内。
3、电磁铁电磁设计
此处采用的是柱坐标系,不是平面的XY坐标系,仿真结果是有差异的。采用0.6mm线径,总共66匝,电阻大概为R=0.385(欧姆)
在过励磁输出模式下电流随吸力的变化如下,在2A的情况下刚好20N,在给一定余量的情况下可以给到3A,有44.6N,余量比较合适。此时的功率为3.4W。
在通常励磁输出模式下电流随吸力的变化如下,在0.5A的情况下有36N,在给一定余量的情况下可以给到1A,有101N,余量比较合适。此时的功率为0.385W非常低。
l 动态制动器设计:能量回收电容
动态制动器中的再生制动是指电机在减速或停车时将制动产生的能量通过逆变回路反馈到直流母线,经阻容回路吸收,再生电路如下图。在协作机器人中一般不加入再生电阻,主要靠电容去吸收能量。
能量回收系统计算如下:
根据上面的计算公式,电容做如下设计:
从上面计算可以看出,对协作机器人J456在3kg负载,30rpm情况下,电机电阻基本上都能完全消耗减速反充回来的能量,所以电容大小不用很大,满足马达负载输出就行。




















请先 登录后发表评论 ~