机器人关节模组一次讲透
2026-04-16 13:10:38
·
机器人技术笔记
·
机器人技术笔记
机器人关节看起来只是一个会转的轴,背后其实是电机、减速器、驱动器、编码器,甚至抱闸共同组成的高度集成系统。理解关节由什么构成,基本就理解了机器人“怎么把控制命令真正变成动作”。
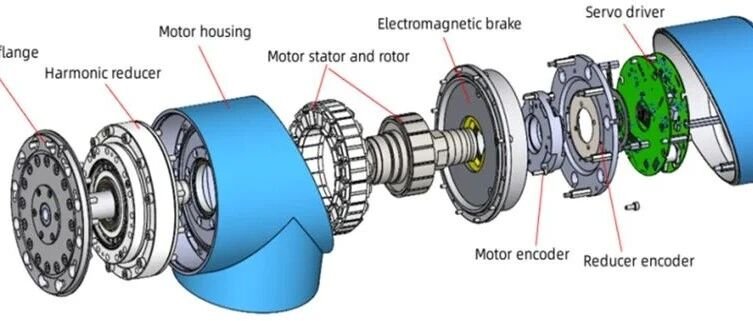
如果把机器人整机拆开来看,最核心的单元之一,其实就是关节。很多人第一次接触机器人时,容易把关节理解成“一个会转的电机”,但真正的机器人关节,通常并不是单独一个电机就能完成工作的。尤其是在工业机械臂、协作机器人、人形机器人这些对体积、精度、输出能力都有要求的系统里,一个完整关节往往是把电机、减速器、驱动器、编码器,有时再加上抱闸,集成在一个尽量紧凑的结构中。从工程角度看,机器人关节的价值并不只是“让轴转起来”,而是要在有限空间里,同时实现输出力矩、运动精度、控制响应、结构尺寸和可靠性之间的平衡。所以理解机器人关节,不能只看某一个零件,而要把它当成一个完整的机电系统来看。图片来源:Perez-Ubeda, Rodrigo & Zotovic Stanisic, Ranko & Gutiérrez, Santiago. (2020). Force Control Improvement in Collaborative Robots through Theory Analysis and Experimental Endorsement. Applied Sciences. 10. 4329. 10.3390/app10124329.这篇文章就结合关节模组的常见结构,讲清楚机器人关节通常由哪些部分组成,以及它们各自负责什么。1. 电机:关节的动力来源
电机负责把电能转换成机械能,为关节提供最原始的旋转动力。没有电机,关节就不可能主动运动。机器人里常见的方案通常是伺服电机,原因很简单:机器人不是“能转就行”,而是要能精确地控制转到哪里、转多快、输出多大力矩。高速电机容易做得小,但直接输出到关节时,往往力矩不够;低速大力矩电机虽然能直接带动负载,但体积、重量和成本通常都很高。所以在很多机器人关节里,电机并不是直接带动负载,而是先输出高速旋转,再通过后面的减速器把速度降下来、把力矩放大。这也是为什么机器人关节的设计,很少只讨论电机,而总是把电机和减速器放在一起看。从系统层面讲,电机决定的是这个关节的动力上限和动态能力。比如能不能快速响应,能不能频繁启停,能不能在高带宽控制下保持稳定,这些都和电机本体特性密切相关。2. 减速器:把高速小力矩变成低速大力矩
如果说电机提供的是“原始动力”,那减速器负责的就是把这种动力变成更适合机器人使用的形式。机器人关节大多数时候并不需要特别高的转速,真正需要的是较大的输出力矩,以及更稳定、更可控的低速运动。因此,减速器的主要作用有两个:第一,是降速增矩。
电机转得很快,但力矩有限;经过减速之后,输出轴转得更慢,但能带动更重的负载。第二,是提升输出侧的控制分辨率。
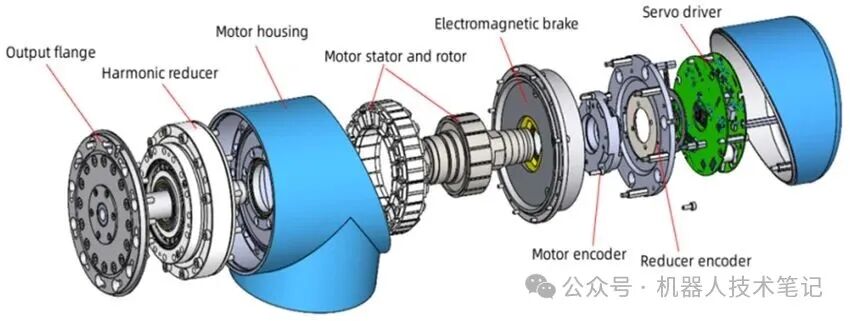
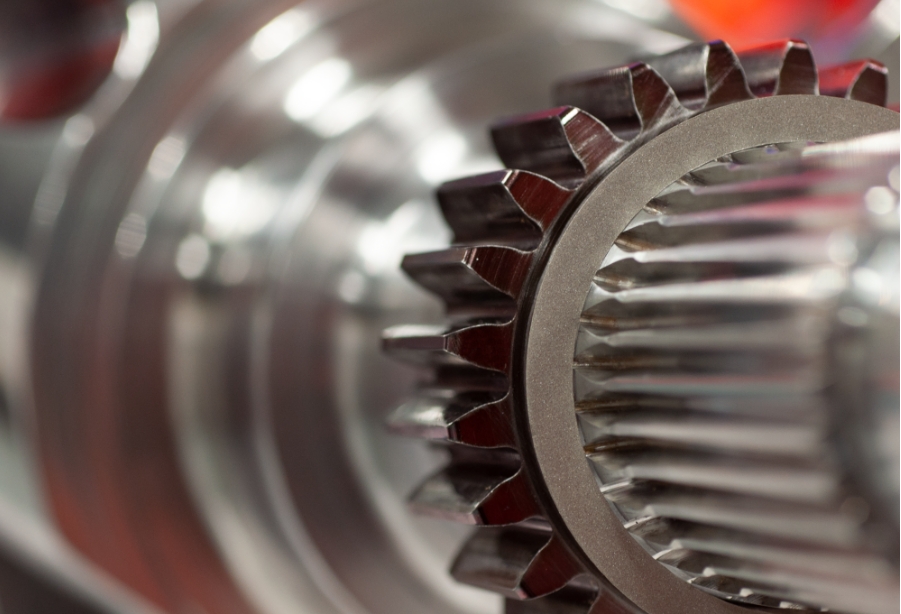
因为减速之后,电机端的一个较小转角变化,对应到输出端会变得更细,这对实现高精度关节控制是有帮助的。在机器人关节里,常见的减速器类型包括谐波减速器、RV 减速器、行星减速器等。图里展示的就是一种比较典型的谐波减速器结构。它的优点通常是体积紧凑、减速比高、适合集成在机器人关节内部,因此在协作机器人和很多轻量化机械臂上很常见。当然,减速器也不是只有优点。它会带来摩擦、间隙、柔顺性、效率损失和回差等问题。也就是说,减速器虽然解决了力矩问题,但同时也会让控制问题变得更复杂。所以机器人关节设计从来不是“减速比越大越好”,而是要在输出能力和控制性能之间找到一个合适的平衡点。3. 驱动器:真正让电机“按要求工作”的控制执行单元
很多人容易忽略驱动器,因为它不像电机和减速器那样直观可见,但从控制角度看,驱动器其实是机器人关节里非常关键的一层。电机本身不能直接理解“转到 30 度”“速度保持 1 rad/s”“输出这个力矩”这样的控制目标。它只能对输入的电流、电压产生响应。而驱动器的作用,就是把上层控制器给出的目标,变成电机能够执行的电信号。换句话说,驱动器相当于连接“算法”和“硬件”的桥梁。一类是功率驱动。
也就是把外部供电转换成适合电机工作的电流和电压形式,真正把电送到绕组里。一类是闭环控制。
驱动器会根据编码器反馈,做电流环、速度环、位置环等控制,使电机按照要求运行。很多伺服系统里,最快速、最底层的控制环节通常就在驱动器内部完成。还有一类是保护和管理。
比如过流保护、过温保护、故障检测、通信接口管理等,也往往集成在驱动器里。如果说电机决定了关节“能不能动”,那驱动器决定的就是关节“动得好不好”。一个好的驱动器,不只是把电机带起来,更重要的是能不能稳定、平顺、可靠地执行控制命令。4. 编码器:关节知道自己转到哪了
机器人之所以能精确运动,离不开反馈。而最基础、最重要的反馈元件之一,就是编码器。编码器的作用,是测量旋转位置,有时也能进一步估计速度、方向等信息。没有编码器,系统就只能“盲转”;有了编码器,控制器才知道当前电机转了多少、输出轴到了哪里,从而形成闭环控制。电机编码器
它测的是电机转子的位置,主要服务于电机换相和伺服控制。因为驱动器需要非常高频、非常精细地知道电机当前状态,这样才能把电流环、速度环做稳。减速器输出端编码器
另一个常见配置,是在减速器后端或者输出轴附近安装输出编码器,有时也叫减速器编码器。它测的是更接近关节实际输出的位置。这样做的意义在于:即使减速器内部存在弹性变形、间隙或微小误差,系统也能直接感知最终输出端的真实状态。一个更关心电机本身怎么转,一个更关心关节最终转到了哪里。对于高性能机器人关节来说,只靠电机侧测量往往是不够的。因为电机和最终负载之间隔着减速器,而减速器并不是理想刚体。要想把控制做得更精确、更稳定,输出侧信息通常也很重要。5. 抱闸:让关节在断电时“刹住”
除了前面这些核心部件,有些机器人关节里还会加入抱闸,也就是电磁制动器。抱闸最主要的作用,不是让关节运动,而是让关节在某些情况下保持不动。典型场景包括:比如机械臂的肩关节、肘关节,或者需要长期抗重力保持姿态的轴,常常会配置抱闸。这样即使系统失电,也不会因为负载下坠造成设备损坏或者安全问题。对于一些结构特别紧凑的机器人,或者本身负载较轻、失电后风险较低的关节,为了节省空间、降低重量和简化结构,可能就不会集成抱闸。特别是在强调轻量化和高集成度的小型机器人里,这种情况并不少见。所以抱闸更像是一个“按需配置”的安全部件,而不是每个关节的绝对标配。6. 一个机器人关节,本质上是一个小型机电系统
把这些部件放在一起看,就会发现机器人关节并不是单一零件,而是一个高度集成的系统:这几个部分互相配合,才构成了一个真正能在机器人上使用的关节模组。也正因为如此,机器人关节的难点从来不只是“把这些零件装进去”,而是如何在有限体积内,把它们做成一个输出够强、精度够高、控制够稳、散热够好、可靠性够高的整体。这也是为什么关节模组一直是机器人产业里非常核心、也非常有壁垒的部分。表面上看,大家都在做机器人关节;但真正拉开差距的,往往不是有没有这些部件,而是这些部件之间是否做到了高质量的系统集成。



























请先 登录后发表评论 ~