


机器人关节控制硬件知识——伺服电机、驱动器、控制器
关注
伺服电机:在自动控制系统中,伺服电机作为执行元件,将所收到的电信号转换成电动机轴上的角位移或角速度输出。机器人的每个关节运动都依赖伺服电机驱动,以实现多自由度的运动。驱动器:驱动器负责接收控制指令并驱动伺服电机。
- 伺服电机:在自动控制系统中,伺服电机作为执行元件,将所收到的电信号转换成电动机轴上的角位移或角速度输出。机器人的每个关节运动都依赖伺服电机驱动,以实现多自由度的运动。
- 驱动器:驱动器负责接收控制指令并驱动伺服电机。它通常具有多种控制模式,如转矩(电流)、转速和位置,通过不同模式的选择可以实现各种运动控制。驱动器内部包括电机,为驱动器提供动力来源,通过电能转化为机械能,提供所需的扭矩和转速。此外,驱动器还包含联轴器和减速器等部件,这些部件作为连接动力源和执行终端的中间机构,具有匹配转速和传递转矩的作用。
- 控制器:控制器是机器人系统的核心,负责发出动作指令信号给驱动器。它主要控制机器人在工作空间中的运动位置、姿态和轨迹,以及操作顺序和动作的时间等。控制器通过工业总线或直接给出脉冲/方向信号,实现对驱动器的控制,从而实现复杂的运动,如复杂的轨迹规划和多轴联动。
伺服控制单元,即,经由闭环控制方式达到一个机械系统的位置,扭矩,速度或加速度的控制,是自动控制系统中的执行单元,是把上位控制器的电信号转换成电动机轴上的角位移或角速度输出。
1. 控制器:动作指令信号的输出装置。
2. 驱动器:接收控制指令,并驱动马达的装置。
3. 伺服马达:驱动控制对象、并检出状态的装置。
控制器(controller)主要是发控制指令给驱动器的(通过工业总线或直接给pluse/direction信号),用以实现比较复杂的运动,比如复杂的轨迹规划,多轴联动。
驱动器(driver)可以驱动单个电机运动,一般具有三种控制模式,转矩(电流),转速和位置.可以通过不同模式的选择实现比较简单的运动控制。
驱动器直接驱动电机,而控制器需要通过驱动器间接控制电机
以零差云控的一体化关节为例:

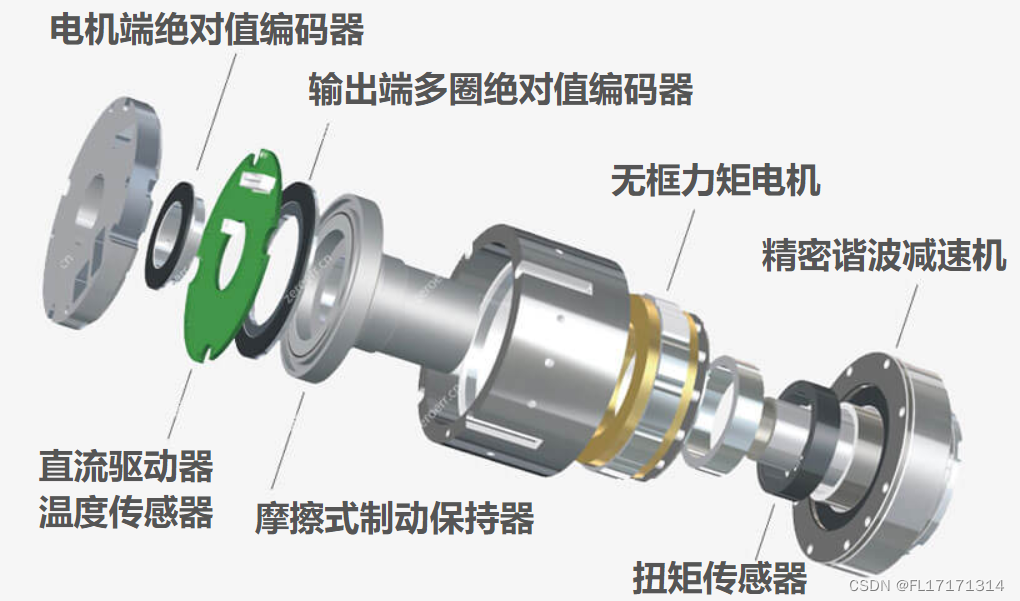

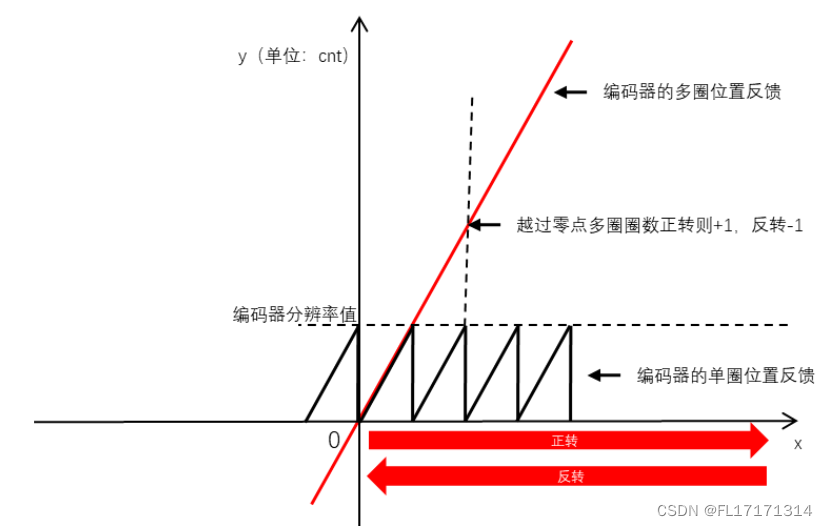
编码器分辨率和单圈位置反馈
编码器分辨率是指轴转一圈所输出的位置数,例如模组的输出端(负载端)分辨率为 19Bit,
即一圈输出的位置数是 2 19 ;19Bit 分辨率的单圈位置反馈是 0~524287,在 0 的位置往反方向
运动会从 0 跳变到 524287,在 524287 位置往正方向运动会从 524287 跳变到 0。
计算单圈角度对应编码器位置(19Bit):角度 ÷ 360 × 524288
例如 20°的位置对应编码器位置为 20 ÷ 360 × 524288
位置反馈如下:
 https://mp.weixin.qq.com/s?__biz=Mzg3MDY1Mzc3NQ%3D%3D&mid=2247495559&idx=1&sn=7f9e4bfa684ec51f5b609ba128cb99a5&scene=45#wechat_redirect
https://mp.weixin.qq.com/s?__biz=Mzg3MDY1Mzc3NQ%3D%3D&mid=2247495559&idx=1&sn=7f9e4bfa684ec51f5b609ba128cb99a5&scene=45#wechat_redirect
阅读全文















请先 登录后发表评论 ~