
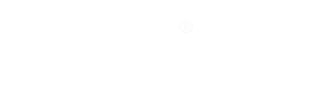

人形机器人的核心配件——关节与成本

在特斯拉人形机器人即将进入大规模生产阶段之际,其有望在全球机器人市场引发显著的“鲶鱼效应”。近期,特斯拉首席执行官埃隆·马斯克公布了最新的人形机器人Optimus的产量规划。
按照规划,特斯拉计划于2026年将人形机器人的产量提升至5万到10万台,并在次年即2027年进一步扩大至100万台,从而实现连续两年产量增长十倍的战略目标。马斯克表示:“如果一切按计划顺利推进,在明年(2026年)我们的产量将实现十倍的增长,预计将达到5万到10万台人形机器人,而在随后的一年内我们还将再次实现十倍的增长。”
在国内市场方面,优必选、宇树、傅立叶、智元、乐聚等人形机器人本体厂商正加速引领产业进程;同时,华为、小鹏、小米、广汽集团等企业也在加码布局人形机器人赛道,重量级玩家的不断增多正在加速推动产业发展。特斯拉的人形机器人被视为全球机器人行业的风向标。随着特斯拉人形机器人的量产在即,国内产业链各环节有望加速迎来新的机遇和发展空间。
在人形机器人供应链中,灵巧手、丝杠、减速器、传感器、电机和控制器等环节具有高价值,值得重点关注。
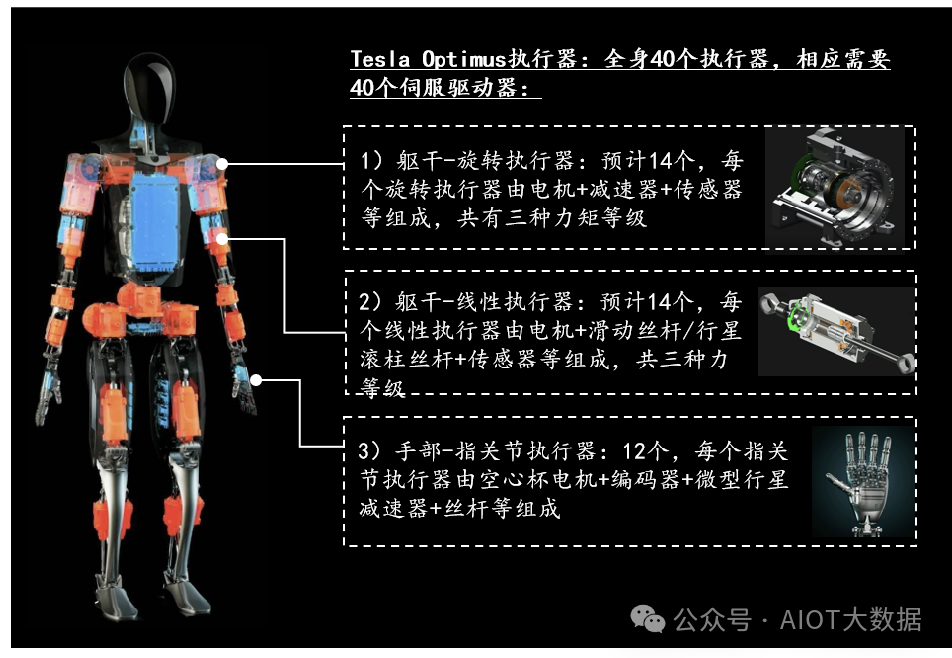
特斯拉人形机器人Optimus全身拥有28个自由度,上肢采用旋转关节方案,下肢则采用了线性关节执行器方案。关节部分的整体成本占比约为55%,主要包括旋转关节、直线关节以及灵巧手等关键组件。
1、旋转关节
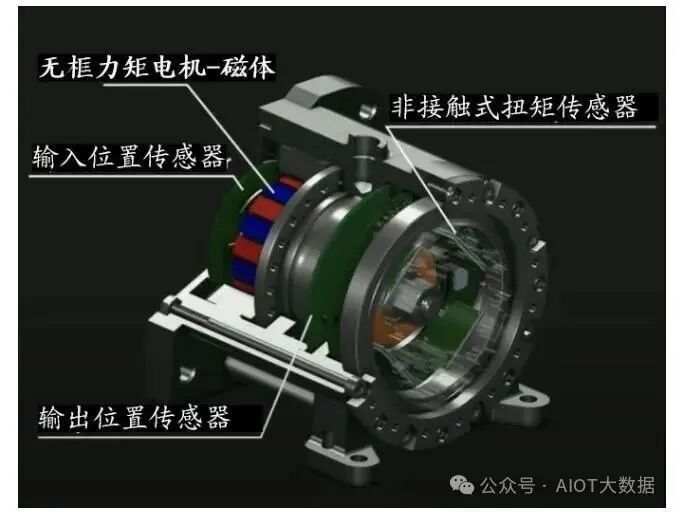
旋转关节主要包括驱动器、无框力矩电机、谐波减速器、编码器、机械离合器和轴承等关键部件。在特斯拉人形机器人Optimus中,14个旋转关节的合计成本占比约为14.1%。
无框力矩电机
19世纪末至20世纪中叶:早期电机设计主要服务于工业生产和电力转换等通用场景,结构上包含固定外壳和标准化尺寸。
20世纪中期:随着航空航天、精密制造等领域对高精度、小型化电机需求的增长,无框电机的概念逐渐形成。这种设计通过去除非必要部件,直接将负载与转子相连,实现更高效率和灵活性。
1949年:美国Inland电机公司发明了第一台无框力矩电机,并将其应用于导弹和空间飞行器的惯性制导系统,标志着该技术在高端领域的初步应用。
近年来,无框力矩电机在人形机器人中的广泛应用进一步推动了其发展:
2022年:特斯拉在其AIDay活动中展示了Optimus人形机器人,该机器人使用了28个无框力矩电机(14个直线执行器和14个旋转执行器),这一创新引发了行业对无框电机的高度关注。
2023年:全球无框力矩电机市场规模达到6.57亿美元,预计到2030年将增长至9.03亿美元,其中人形机器人的普及成为重要驱动力。
未来,无框力矩电机将继续朝着高性能化、智能化和多场景适应性的方向发展,通过技术创新提升转矩密度、散热性能及动态响应能力,拓展在工业自动化、新能源、航空航天等领域的应用范围。
无框力矩电机的技术特点与市场格局
定义与性能:无框力矩电机是一种以输出扭矩大小为性能指标的电机类型,通常被视为具有多极对数的无刷、永磁、直驱伺服电机。
无框力矩电机在工业应用中展现出显著优势,主要体现在以下几个方面:
性能提升:直接耦合设计无背隙,提供更高的系统带宽和集成度,降低风磨损失,从而提高整体效率。
结构紧凑:占用空间小且单位体积扭矩高,使设备更加轻便灵活。
高刚性直驱:无需皮带、齿轮箱等传动部件即可实现高精度直驱控制,简化了机械结构。
静音运行:通过优化集成减少不必要的传动组件,有效降低了工作噪音。
低维护需求:设计简洁,减少了易损件数量,降低了长期使用中的维护成本。

无框力矩电机的核心技术难点主要体现在以下几个方面:
1.扭矩性能优化:包括降低齿槽转矩波动、提高推重比,以及减小不平衡磁拉力。这些因素直接影响电机运行的平稳性和效率。

2.温度控制:电机在稳定运行时会产生热量,需要有效散热以避免温升过高导致的绕组损坏或永磁体退磁问题。
3.电性能设计:涉及反电动势管理、功率因数提升和最大电流设定等,需确保与驱动器硬件及算法匹配,实现高效能量转换。
此外,无框力矩电机还面临以下挑战:
磁路与工艺设计:要在低压环境下输出大功率,对磁路布局和制造精度要求极高。
定制化集成难度:由于直接嵌入设备结构中,其设计需高度契合具体应用场景,增加了开发复杂性。
总体而言,无框力矩电机的技术难点集中在高性能与高可靠性的平衡上,同时需兼顾成本效益和应用灵活性,这对研发和制造提出了较高要求。
无框力矩电机在特斯拉人形机器人中的应用
在特斯拉的人形机器人设计中,14个线性执行器和14个旋转执行器均采用了无框力矩电机。这种电机作为核心零部件之一,以其极高的控制精度而著称,广泛应用于人形机器人的线性和旋转关节。
国产人形机器人本体厂商如宇树H1、远征A1、小米Cyberone、优必选X1、傅里叶GR1,关节单元也都使用无框力矩电机,最大扭矩为360Nm。
旋转关节中的无框力矩电机:
全球市场格局:
全球市场上,无框力矩电机的生产和技术主要集中在几家头部企业手中,包括美国的科尔摩根(Kollmorgen)、德国的威腾斯坦(Wittenstein)、日本的尼得科(Nidec)以及美国的派克汉尼汾(ParkerHannifin)等。
科尔摩根是最早研发出无框电机的企业之一,并且拥有高端产品的核心技术,其KBM系列无框电机是公司的明星产品。
国内发展现状:
国内无框电机行业的参与者相对较少,市场集中度较高,头部企业在市场中占据主导地位。
根据公开信息显示,国内的主要参与者包括步科股份、昊志机电、伟创电气、禾川科技等公司。
编码器的重要性及其市场情况:
编码器对于电机的运动控制功能至关重要,高端产品的关键元件如芯片和码盘的制作工艺难度较大,这构成了国产化的主要壁垒。
在编码器市场方面,长期以来被海外企业所占据,例如海德汉(Heidenhain)、多摩川(TamagawaSeiki)、雷尼绍(Renishaw)等。
我国本土领先的供应商包括禹衡光学(奥普光电)、长春汇通(汇川技术)、宜科电子、苏州捷之硕等,其中禹衡光学在国内处于领先地位,技术水平能够与外资竞争,市占率约为7.7%。
无框电机编码器技术要点及行业瓶颈
技术要点:高精度反馈与动态控制
无框电机编码器需满足微米级定位精度(误差<0.01°)和高速响应需求。以特斯拉Optimus关节为例,其采用双编码器全闭环控制(绝对式+增量式),通过24位分辨率(0.0003°)实现精密位置反馈 。核心参数包括:
电流环响应频率:≥10kHz(确保瞬时扭矩控制精度)
速度环带宽:≥3kHz(支撑高频动态调整)
抗干扰能力:Netzer电容编码器通过无磁敏感设计,可在强磁场环境下保持±1弧分精度。
结构集成与抗干扰设计
紧凑化:采用中空编码器设计(如新剑传动φ2.5mm行星滚柱丝杠配套方案),轴向尺寸压缩至<10mm,适配无框电机紧凑布局 。
抗干扰技术:
光学编码器:光栅盘刻线密度达5000线/转(如奥普光电方案),需解决粉尘污染导致的信号衰减 。
磁电编码器:通过霍尔阵列检测磁场变化(如禾川科技方案),但需突破磁滞效应引起的累积误差 。
温度与功耗优化
温升抑制:无框电机绕组温升≤45℃(耐温等级F级,155℃)条件下,编码器需在68℃环境稳定工作,通过纳米涂层(如长盛轴承石墨烯方案)降低摩擦热 。
低功耗设计:集成ASIC芯片(如雷赛智能方案)将功耗从5W降至1.2W,适配48V低电压系统 。
智能化功能扩展
自诊断功能:集成MEMS传感器(如柯力六维力传感器),实时监测轴承形变和振动频谱(0-10kHz),预判机械故障 。
多协议兼容:支持EtherCAT、CANopen等工业总线协议,降低与驱控系统集成难度(如汇川技术驱控一体模块) 。
行业瓶颈:核心技术依赖
高端芯片:主控DSP(如TI C2000系列)进口占比超90%,国产RISC-V架构处理器(如平头哥玄铁)尚未成熟 。
精密加工设备:螺纹磨床(瑞士斯图特S41)单价超100万欧元,国产设备(秦川YKS7225)精度仅达C5级,加工周期多20天 。
材料与工艺制约
滚柱材料:GCr15轴承钢依赖日本大同钢铁进口,国产材料杂质含量高导致寿命仅为进口的60% 。
装配精度:滚柱啮合间隙需人工调整(±2μm),良率仅85%(国际水平95%),制约量产效率 。
标准与验证体系缺失
检测标准:国内缺乏人形机器人专用编码器寿命测试标准(国际参考ISO 15242),导致产品可靠性验证周期长达2年 。
环境适应性:现有国产编码器在-40℃~150℃极端工况下失效率达3%(国际<0.5%),限制航空航天等高端应用 。
成本与市场渗透矛盾
价格劣势:同类产品国产单价较日系(多摩川)高30%,但在精度(23位 vs 25位)和寿命(5万小时 vs 10万小时)上存在差距 。
替代难度:瑞士GSA、德国海德汉占据全球72%市场份额,国产编码器在医疗、军工等领域渗透率不足15% 。
突破路径:技术创新方向
材料端:开发氮化硅陶瓷编码盘(抗弯强度>800MPa),替代易受温升影响的金属材料 。
工艺端:推广模切工艺(昊志机电方案),将齿形加工效率从1件/分钟提升至5件/分钟,设备成本降低80% 。
产业链协同
上下游整合:五洲新春“编码器+谐波减速器”一体化模块,减少装配误差,系统成本下降25% 。
标准共建:推动《人形机器人编码器分级标准》制定,明确C5级(±5μm/m)为量产门槛 。
应用场景拓展
新兴领域:适配光伏晶圆搬运(精度需求±0.001mm)、腹腔镜手术机器人(无菌环境抗腐蚀需求)等高端场景 。
市场规模:2025年全球伺服编码器市场预计达12亿美元,其中国人形机器人领域占比35%(4.2亿美元) 。
国产化率:2023年国产编码器市场份额仅18%,预计2030年提升至40%(绿谐、禾川等主导) 。
无框电机编码器的技术突破需聚焦精密材料、智能算法、验证体系三大方向,通过国产替代(如绿的谐波三次谐波技术降本30%)和场景创新(如医疗微型化),方能在人形机器人爆发周期(2025-2030)抢占市场高地。
人形机器材人无框电机编码器的双编码器全闭环控制技术
无框电机编码器的双编码器全闭环控制技术是一种高精度的位置反馈系统,通过结合两个独立的编码器实现对电机位置和速度的精确控制。这种技术广泛应用于机器人关节等需要精密运动控制的场景中。
工作原理
位置命令接收与转换:伺服驱动器接收到上位机发送的位置指令后,将其转化为目标位置值(CmdPos)。同时,外部编码器实时监测实际位置(FbPos) 。
误差计算与补偿:将目标位置与实际位置进行比较,得出位置偏差(CmdPos - FbPos),并乘以比例系数KP得到调整量。这一过程通过PID控制器完成,确保快速响应的同时避免过调 。
速度控制:根据调整后的目标位置,计算出所需的速度指令(CmdSpeed),并与内部编码器反馈的实际速度(FbSpeed)对比,进一步优化速度控制 。
电流控制:最终,通过电流环路调节电机转矩,确保精准跟踪速度指令 。
关键优势
提高精度:通过直接测量负载位置,消除机械传动带来的累积误差,显著提升控制精度 。
动态响应优化:采用多段式轨迹规划(加速、恒速、减速),使运动更加平稳顺畅 。
故障保护机制:内置报警功能,在检测到异常时及时停止动作,防止设备损坏 。
应用案例
在人形机器人领域,如特斯拉Optimus,双编码器全闭环控制系统被用于其无框力矩电机,实现了微米级定位精度和高速响应能力。此外,天太机器人的“智巧”系列关节也采用了类似技术,具备高扭矩密度和抱闸制动功能,适用于工业自动化、医疗手术机器人及外骨骼机器人等多种场景 。
双编码器全闭环控制技术凭借其高精度、强稳定性和广泛的适用性,成为高端运动控制领域的关键技术之一,尤其在机器人行业展现出巨大潜力。
目前我国无框电机行业仍处于起步阶段,市场参与者数量有限,但随着技术的进步和市场需求的增长,国产替代的空间广阔,未来有望实现更大的突破和发展。
谐波减速器
减速器是人形机器人用量价值较大的零部件,成本占比高达35%。在人形机器人的关节部位,如肘关节、腕关节等,减速器被广泛应用以实现精确的传动和控制。
谐波减速器因其体积小、重量轻、传动比大等特点,常被用于这些需要精细操作的部位。谐波减速器是靠波发生器使柔轮产生可控的弹性变形波,通过与刚轮的相互作用,实现运动和动力传递的传动装置。
谐波减速器是一种精密传动装置,通过柔轮、刚轮和波发生器的相互作用实现运动和动力传递。其工作原理基于波发生器使柔轮产生可控弹性变形,与刚轮啮合完成减速过程。
核心优势
谐波减速器具有体积小、重量轻、传动比大等优点,在机器人关节等需要精细操作的部位应用广泛:
高精度:多齿同时啮合可补偿误差,确保精准传动。
承载能力强:柔轮采用高强度材料,齿间为面接触,结构稳固耐用。
灵活设计:无外壳限制,便于集成到复杂系统中。
谐波减速器核心技术分析
1.高精度啮合齿形设计
谐波减速器的核心在于通过柔轮与刚轮的弹性变形实现精准传动。其关键技术包括齿形优化(如绿的谐波的“P型齿”结构)和多齿啮合误差补偿技术,需通过理论建模和精密加工确保传动精度(误差控制在微米级)。例如,绿的谐波的“P型齿”通过独特齿廓设计,降低应力集中并提升寿命。
2.柔轮材料与热处理工艺
柔轮需兼具高弹性与耐磨性,常用材料为40Cr合金钢或球墨铸铁。球墨铸铁虽能显著提升寿命(如哈默纳科产品),但加工难度高,需复杂热处理工艺平衡弹性和耐磨性。国内企业多采用40Cr钢材,但存在温升高、润滑脂失效等问题,导致精度寿命仅58个月。
3.波发生器动态特性优化
波发生器需通过柔性轴承和凸轮设计实现柔轮的高频弹性变形。其动态特性直接影响传动平稳性,需解决共振现象(如人形机器人双手抖动问题)和棘轮效应(过载导致啮合失效)。
4.多物理场耦合仿真技术
需结合材料力学、热力学和动力学进行仿真,优化传动效率(通常达69%96%)和抗冲击能力,同时避免温升导致的润滑失效。
量产难点分析
1.高精度设备依赖与高投入
谐波减速器的加工需慢走丝机床、插齿机等高精度设备(占总投入80%),设备单价高且交付周期长(814个月),导致初期投入超5000万元。例如,绿的谐波2023年定增20亿元扩产,单线设备成本仍制约产能。
2.材料与工艺矛盾
球墨铸铁柔轮寿命长但加工难,国内多采用40Cr钢材,但需牺牲寿命。慢走丝工艺仅适用于钢材,而插齿工艺需进口机床和刀具,进一步推高成本。
3.装配工艺依赖人工经验
柔轮与刚轮的装配需经验丰富的技工调整啮合间隙,人工不足成为扩产瓶颈。绿的谐波通过模块化设计部分缓解,但高精度产品仍需人工调试。
4.量产工艺创新需求
传统工艺效率低(慢走丝加工仅12件/分钟),国内企业如旭展精密尝试模切工艺,将齿形加工效率提升至2件/分钟,设备投入降至百万级,但需5年以上验证周期。
国产替代与技术突破方向
材料端:推动球墨铸铁国产化,结合热处理工艺优化(如旭展精密通过6年研发实现材料稳定性)。
工艺端:发展模切、辊压等新工艺,降低设备依赖(如绿的谐波新一代产线效率提升3倍)。
集成化:绿的谐波推出机电一体化关节模块,降低下游集成难度,提升附加值。
当前,哈默纳科全球份额超80%,我国谐波减速器市场较为集中,前五大厂商出货量占比超六成。绿的谐波引领国产替代,来福谐波、同川科技等企业也加快市场布局。而绿的谐波国产市占率达26%,通过扩产和技术迭代(如三次谐波技术),有望在人形机器人需求爆发中抢占份额。
特斯拉Optimus机器人减速器方案:
特斯拉的人形机器人Optimus采用了谐波减速器和行星减速器相结合的设计方案:
旋转关节:全身14个旋转关节均使用了谐波减速器。
手部自由度:而手部的12个自由度则采用了行星齿轮箱。
伺服驱动器
特斯拉Optimus伺服驱动器技术深度解析
1. 执行器与伺服驱动器需求
特斯拉人形机器人Optimus采用全电机驱动方案,其最新版本(根据马斯克2023年二季度财报披露)全身搭载40个关节执行器,每个执行器需配套独立伺服驱动器以实现高精度运动控制 。这一设计对应至少40个伺服驱动器,确保机器人完成深蹲、瑜伽、搬运等复杂动作的灵活性和精准度 。相较于Gen 1版本的28个执行器(线性和旋转各14个),Gen 2通过新增颈部自由度、优化手部传感功能实现了动作能力的跃升 。
2. 驱动架构与集成化趋势
Optimus驱动系统遵循主控系统→控制器→驱动→传动→执行→传感反馈的闭环逻辑。伺服驱动器在此架构中不仅承担功率放大功能,还通过集成三环控制算法(位置环、速度环、电流环)实现部分运动控制任务,其中电流环响应频率可达10kHz以上,速度环带宽超过3kHz,显著提升动态性能 。
技术演进方向:
驱控一体化:通过集成FPGA或专用ASIC芯片,将伺服驱动与运动控制器功能融合,减少信号传输延迟(可缩短至μs级),提升系统响应速度 。
碳化硅器件应用:采用SiC MOSFET替代传统IGBT,开关频率提升至100kHz以上,损耗降低40%,满足人形机器人高频高过载需求 。
3. 核心部件技术方案
根据特斯拉AI Day披露,Optimus执行器分为两类:
执行器类型 | 核心配置 | 应用部位 | 技术特性 |
线性执行器 | 无框力矩电机+行星滚柱丝杠 | 大臂、大腿等大负载关节 | 推力达1200N,重复定位精度±0.01mm,行星滚柱丝杠传动效率90% |
旋转执行器 | 无框力矩电机+谐波减速器 | 肩部、腕部等高精度旋转关节 | 谐波减速器传动精度≤1弧分,双编码器实现全闭环控制,扭矩密度达30Nm/kg |
Optimus执行器技术参数对比(数据来源:特斯拉AI Day )
4. 国产伺服驱动产业链机遇
国内厂商在伺服驱动领域已实现关键技术突破,核心进展包括:
功率模块:汇川技术推出基于SiC的驱控一体模块,功率密度达2.5kW/kg,适配人形机器人关节需求 。
控制算法:禾川科技开发的自适应陷波滤波算法,可将谐振抑制带宽扩展至2.5kHz,显著提升运动平稳性 。
编码器集成:雷赛智能推出23位绝对值编码器方案,位置分辨率达到0.0003°,满足高精度关节控制需求 。
市场格局:
2023年国内伺服系统市场CR10达72%,其中汇川技术以21.5%市占率位居国产第一,禾川科技(3.4%)、埃斯顿(2.7%)等加速追赶 。
在人形机器人领域,国产伺服驱动器已实现:
成本优势:同性能产品价格较日系品牌低30%-40% 。
定制化能力:支持CANopen/EtherCAT等多协议总线,适配不同本体厂商控制架构 。
5. 技术挑战与突破方向
当前国产伺服驱动器的核心瓶颈在于:
高端芯片依赖:主控DSP芯片(如TI C2000系列)进口占比超90%,需加快自研RISC-V架构处理器 。
热管理难题:高功率密度下(>5kW/L)的散热设计亟待突破,液冷方案或成下一代技术重点 。
寿命验证体系:需建立符合ISO 13849标准的人形机器人专用伺服可靠性测试平台 。
未来3-5年,随着Optimus量产(目标价<2万美元 )和国产人形机器人放量,伺服驱动器市场规模预计突破80亿元,具备高功率密度、智能诊断功能的驱控一体方案将成为竞争焦点
特斯拉关节执行器分布:
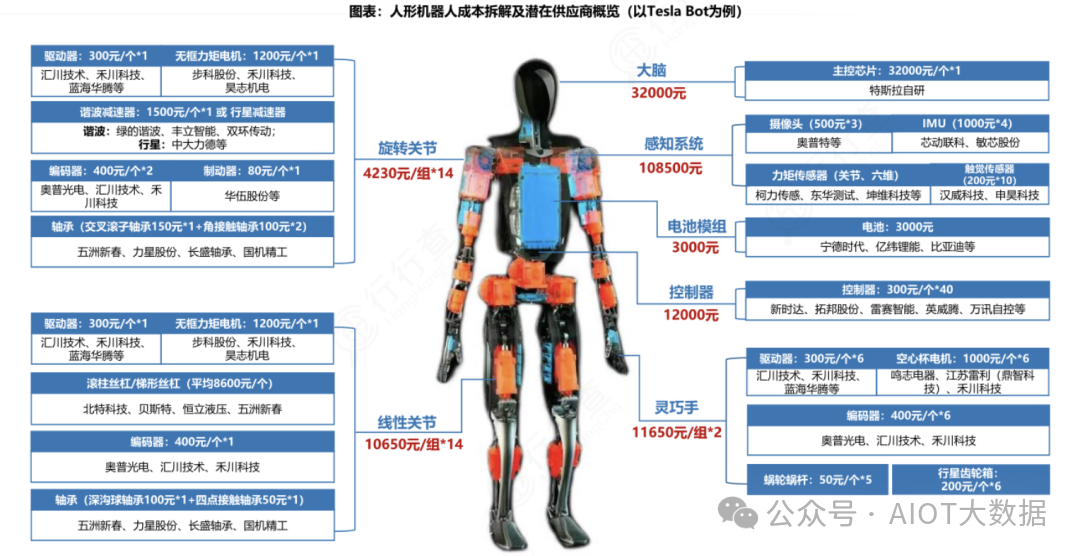
轴承
人形机器人需要的轴承种类多且数量大。轴承主要应用于旋转关节执行器关节连接(包括与减速器、电机等配合使用)的轴承包括角接触轴承、交叉滚子轴承等;谐波减速器需要用到柔性轴承、滚针轴承等。人形机器人灵巧手预计使用24个滑动轴承、24个球轴承和36个滚针轴承。国内轴承环节主要布局厂商包括五洲新春、长盛轴承、力星股份和国机精工等。
人形机器人轴承技术深度解析
1. 轴承在人形机器人中的核心应用场景与技术需求
人形机器人全身需配置200-300个轴承,其性能直接影响关节运动精度(误差需<0.01°)、承载能力(轴向载荷>500N)及使用寿命(>10万小时)。关键应用场景包括:
旋转关节执行器:采用交叉滚子轴承(如INA CRB系列)和角接触球轴承(如NSK 70C系列),其中交叉滚子轴承的径向跳动需≤5μm,刚轮啮合精度直接影响谐波减速器传动误差。
谐波减速器:柔性轴承(如哈默纳科CSF系列)需承受高频弹性变形(>10^7次循环),材料需满足屈服强度≥1600MPa;滚针轴承(如SKF RNA系列)外径公差要求±0.002mm,保障波发生器旋转稳定性。
灵巧手结构:特斯拉Optimus Gen2手部配置24个滑动轴承(PTFE复合材料)、24个球轴承(微型深沟球)、36个滚针轴承(φ1.5mm级),实现单指6自由度的精密抓取(夹持力控制精度±0.1N)。
2. 技术难点与国产化突破
轴承类型 | 国际标杆参数 | 国产突破进展 |
交叉滚子轴承 | 哈默纳科CRB-30:径向跳动≤3μm | 五洲新春CRBU系列:径向跳动≤5μm,批量供货优必选Walker X机器人,单价较日系低40% |
柔性轴承 | 哈默纳科CSF-17:疲劳寿命>2×10^7 | 国机精工FSB系列:寿命突破1.5×10^7次,适配绿的谐波减速器,温升控制≤15℃ |
微型滚针轴承 | INA RNA4901:极限转速30000rpm | 力星股份RN系列:极限转速达25000rpm,配套大族精密行星减速器,轴向游隙≤0.03mm |
陶瓷混合轴承 | NSK Hybrid Cera:DN值2.0×10^6 | 长盛轴承CHC系列:DN值突破1.8×10^6,应用于宇树H1机器人腿部关节,减重30% |
注:DN值=轴径(mm)×转速(rpm),表征高速性能
3. 国产供应链布局与产能规划
五洲新春:投资5亿元建设机器人轴承专线,2024年产能达300万套/年,交叉滚子轴承良率提升至92%(国际水平95%)。
长盛轴承:开发石墨烯涂层滑动轴承,摩擦系数降至0.08(传统PTFE轴承0.15),适配灵巧手高频摆动场景。
力星股份:与南高齿合作开发φ0.8mm级滚针,突破微型轴承钢球冷镦工艺,圆度误差≤0.1μm。
国机精工:依托军工技术转化,柔性轴承疲劳寿命测试平台通过ISO 15242认证,检测效率提升3倍。
4. 市场格局与发展趋势
全球人形机器人轴承市场规模预计2025年达12亿美元,其中:
交叉滚子轴承占比45%(哈默纳科占80%份额)
柔性轴承占比30%(绿的谐波国产替代率达26%)
微型轴承占比25%(国内厂商份额不足15%)
技术演进方向:
材料创新:氮化硅陶瓷轴承(抗弯强度>800MPa)替代钢制轴承,解决谐波减速器温升导致的润滑失效问题
智能化集成:内置MEMS传感器轴承(如舍弗勒SmartCheck),实时监测振动频谱(频率范围0-10kHz),预判故障
工艺革新:激光选区熔化(SLM)3D打印轴承座,实现复杂油路一体化成型,散热效率提升50%
预计到2027年,国产轴承在人形机器人领域的渗透率将从当前18%提升至35%,具备全品类供应能力的企业将主导百亿级市场。
2、直线关节
特斯拉人形机器人直线关节也包括上述旋转环节中的驱动器、无框力矩电机、编码器,新增的部分在于增加了行星滚柱丝杠/梯形丝杠,以及轴承主要是深沟球轴承和四点接触轴承。
直线关节的主要构成
驱动器:负责接收指令并控制电机运行。
无框力矩电机:提供高扭矩输出,直接集成于关节中以减少体积和重量 。
编码器:实时反馈位置信息,确保精准控制。
行星滚柱丝杠/梯形丝杠:将电机的旋转运动转化为直线运动,实现精确位移 。
轴承:如深沟球轴承和四点接触球轴承,用于支撑轴向和径向载荷,保证平稳运行 。
工作原理
直线关节通过驱动器控制无框力矩电机转动,再经由行星滚柱丝杠或梯形丝杠将旋转运动转换为直线运动。这一过程结合编码器的位置反馈,实现了高精度、稳定的直线位移 。
成本分析
特斯拉Optimus共有14个直线关节,占整体成本约35.4%。其中,丝杠(尤其是行星滚柱丝杠)是关键成本因素,在现阶段成本中占比高达23.4%,预计未来随着技术成熟,成本占比将降至13.9% 。
关键部件详解
无框力矩电机:具有高效率、结构紧凑和易维护的特点,直接安装在转轴上降低系统惯量,提升响应速度 。
行星滚柱丝杠:相比滚珠丝杠,负载能力更强、寿命更长且刚性更高,更适合需要高速度和高加速度的应用场景 。
特斯拉人形机器人的直线关节通过高度集成的设计,结合高性能电机与精密传动元件,实现了高效、精准的直线运动控制,同时不断优化降低成本,为大规模应用奠定了基础。
丝杠
丝杠是将旋转与直线运动互相转化的传动元件,按设计结构角度分为梯形丝杠、滚珠丝杠、行星滚柱丝杠。根据特斯拉发布的相关资料显示,特斯拉人形机器人直线关节总共选用14个行星滚柱丝杠。行星滚柱丝杠是人形机器人零部件最高价值环节,成本占比约28.6%。
以特斯拉Optimus为例,单个行星滚柱丝杠的单价约为1500元/个,单台人形机器人中行星滚柱丝杠的总价值约在2.1万元以上。行星滚柱丝杠是一种新型精密滚动功能部件,具有尺寸小推力大和精度高等优点,是高承载、高转速和复杂工况条件下执行机构的最优选择。
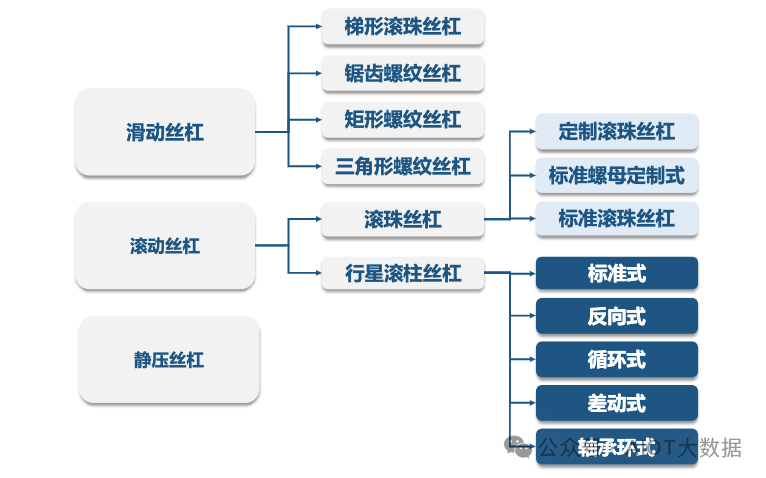
丝杠主要分类:
特斯拉形机器人Optimus直线关节为反式行星滚柱丝杠,使用的是瑞士GSA制造的RGTI12.8。
丝杠技术深度解析与产业应用(基于特斯拉Optimus案例)
丝杠技术分类与性能对比
根据摩擦原理与传动机制,丝杠可分为三大类:
滑动丝杠:传统梯形牙型(牙型角30°),结构简单但效率低(传动效率<50%),适用于低精度场景 。
滚动丝杠:
滚珠丝杠:通过滚珠循环实现滚动摩擦,效率达90%以上,C5级精度可达±5μm/m,但承载能力受限(赫兹接触应力理论限制) 。
行星滚柱丝杠:采用线/面接触的滚柱结构,承载能力提升3-5倍(例如GSA RGTI12.8轴向载荷达8000N),寿命延长15倍,适用于高冲击场景 。
静压丝杠:通过液压系统形成流体膜,实现无接触传动(精度达C3级),但系统复杂度高,维护成本昂贵 。
类型 | 传动效率 | 承载能力(N/mm²) | 寿命(万次循环) | 典型应用场景 |
梯形丝杠 | 30-50% | 50-100 | 10-50 | 建筑脚手架、低端机床 |
滚珠丝杠(C5级) | 90-95% | 150-200 | 200-500 | CNC机床、半导体设备 |
行星滚柱丝杠 | 85-92% | 300-500 | 500-1000 | 人形机器人、航空作动 |
静压丝杠 | >98% | 100-150 | 1000+ | 光刻机、精密测量设备 |
特斯拉Optimus行星滚柱丝杠技术方案
技术参数:
采用反式行星滚柱结构(反向式RGTI12.8),预压螺母设计实现零背隙传动 。
轴向刚度达500N/μm,重复定位精度±0.01mm,适配Optimus腿部3900N推力需求 。
与无框力矩电机直连,系统传动效率达89%(传统滚珠丝杠方案仅75%) 。
成本结构:
单台Optimus配置14套行星滚柱丝杠,总成本占比28.6%(按BOM成本42万元计算,丝杠成本约12万元) 。
瑞士GSA产品单价约8500元/套,国内厂商报价已降至3000-5000元区间(降幅40-65%) 。
性能突破:
五洲新春CRBU系列实现径向跳动≤5μm,批量供货优必选Walker X机器人 。
新剑传动开发φ2.5mm全球最小行星滚柱丝杠,负载15kg,C5级精度,单价进入两位数区间 。
国产替代进程与技术瓶颈
市场格局:
全球市场由Rollvis(29%)、GSA(27%)、Ewellix(15%)主导,国内厂商份额不足16% 。
国产第一梯队:南京工艺(C5级量产)、博特精工(军用领域突破) 。
新兴力量:五洲新春(灵巧手微型丝杠)、北特科技(样件研发)、鼎智科技(医疗设备应用) 。
核心瓶颈:
材料工艺:滚柱需采用100Cr6轴承钢(硬度HRC58+),国内依赖进口棒材,成本比日系高30% 。
加工设备:精密磨床依赖德国埃玛克、日本三井精机,国产设备加工周期长达50天(国际水平30天) 。
装配技术:滚柱与丝杠啮合间隙需控制在±2μm,依赖人工经验(良率仅85% vs 国际95%) 。
降本路径:
工艺创新:昊志机电开发模切工艺,将齿形加工效率提升至2件/分钟,设备成本降低80%。
集成设计:恒立液压推出驱控一体模块,将丝杠+电机+编码器集成度提升40%,系统成本下降25% 。
材料替代:长盛轴承石墨烯涂层方案将摩擦系数从0.15降至0.08,寿命提升3倍 。
产业趋势
技术演进:
微型化:灵巧手需求推动φ3mm级丝杠研发(如五洲新春微型丝杠已送样) 。
智能化:集成MEMS传感器(如柯力传感六维力传感器)实现实时形变监测 。
轻量化:PEEK复合材料丝杠(肇民科技方案)减重50%,刚度提升20% 。
竞争焦点:
精度突破:秦川机床P0级丝杠(媲美THK产品)已完成国产五轴机床验证 。
成本控制:绿的谐波三次谐波技术将传动部件成本降低30%,加速替代滚珠丝杠 。
场景拓展:开普勒机器人将行星滚柱丝杠应用于全身28个关节,推动模块化设计 。
行星滚柱丝杠作为人形机器人核心传动部件,其技术突破将直接影响产业商业化进程。国内企业需在材料冶金(如100Cr6钢国产化)、精密加工(五轴磨床自主化)、系统集成(驱控一体化)三大领域持续投入,方能在2030年实现40%国产化率目标(现约16%) 。特斯拉Optimus的量产进程(2025年小批量、2026年规模上市)将成为行业关键催化剂。
行星滚柱丝杠的制造要点
行业行星滚柱丝杠的制造过程是一项集精密材料科学、复杂加工工艺和高端装备技术于一体的系统工程。根据行业技术背景和搜索结果,其核心制造流程及关键技术要点如下:
材料选择与预处理
行星滚柱丝杠主要采用以下材料:
丝杠主体:42CrMo合金结构钢(抗拉强度≥1080MPa,屈服强度≥930MPa),经调质处理后硬度达HB 269-341 。
滚柱与螺母:GCr15高碳铬轴承钢(接触疲劳寿命≥1×10⁷次循环),表面渗碳处理深度0.3-0.5mm,硬度HRC 58-62 。
材料预处理需通过超声波探伤(UT)和磁粉检测(MT)消除内部缺陷,确保微观组织均匀性 。
核心工艺——螺纹加工
1. 螺纹滚柱成型(技术壁垒最高)
螺纹滚柱作为传动核心,其加工精度直接影响系统寿命(达滚珠丝杠的14倍 ):
粗加工阶段:
冷锻滚压:采用室温高压成型技术(压力达1200MPa),将棒材挤压成螺纹胚体,材料利用率提升30%,晶粒细化至5-10μm 。
旋风硬铣削:适用于淬硬钢(HRC 60+),通过倾斜角刀盘(20-30°)实现螺纹粗铣,效率达传统车削的8倍[[1][6]]。
精加工阶段:
螺纹磨削:使用成型砂轮(金刚石/CBN材质)进行精密磨削,表面粗糙度Ra≤0.04μm,导程精度达G5级(每300mm误差±5μm)[[1][2]]。
纳米抛光:采用化学机械抛光(CMP)技术,消除微观毛刺(尺寸≤0.1μm) 。
2. 螺母内螺纹加工(反向式结构难点)
特斯拉Optimus使用的RGTI12.8反向式行星滚柱丝杠,其螺母内螺纹加工需突破:
砂轮磨削工艺:砂轮单边支撑结构易产生微米级抖动,需通过动态补偿系统(如海德汉TNC640)控制公差至±2μm 。
硬车工艺:采用PCBN刀具(切削速度200m/min)实现高效加工,但刀具寿命仅50-80件,成本较高 。
精密装配与检测
1. 装配工艺
滚柱同步控制:通过行星齿轮系(齿圈模数0.5-1.0)实现6-12个滚柱的等分分布,啮合间隙≤3μm 。
预紧力调整:采用双螺母预压技术,轴向刚度达500N/μm,消除反向间隙 。
2. 检测标准
导程精度检测:使用激光干涉仪(如雷尼绍XL-80)测量300mm行程内的累积误差,C5级精度要求≤±5μm 。
动态负载测试:在模拟工况(轴向载荷8000N,转速6000rpm)下验证寿命≥100万次循环 。
国产化突破与设备瓶颈
1. 技术瓶颈
高端磨床依赖:瑞士斯图特S41、德国卡帕KX260P等螺纹磨床价格达100-200万欧元/台,交货周期超24个月 。
材料进口制约:42CrMo棒材依赖日本大同钢铁,成本比国产高30% 。
2. 国产替代路径
工艺创新:昊志机电开发模切工艺,齿形加工效率提升至2件/分钟,设备成本降低80% 。
集成设计:五洲新春CRBU系列实现径向跳动≤5μm,批量供货优必选Walker X机器人。
设备国产化:秦川机床YKS7225数控蜗杆砂轮磨床已实现C5级丝杠量产,单价降至150万元/台 。
产业趋势
微型化:新剑传动开发φ2.5mm全球最小行星滚柱丝杠,负载15kg,单价进入两位数区间 。
智能化:集成MEMS传感器(如柯力传感六维力传感器)实现实时形变监测 。
据测算,100万台人形机器人将催生83亿元高精度磨床需求,国产设备厂商(如日发精机、华辰装备)有望率先受益 。目前国内企业如五洲新春、恒立液压已实现C5级产品量产,成本较进口降低40-65%。
根据公开资料显示,国内目前已布局行星滚柱丝杠的主要企业有北特科技、恒立液压、贝斯特、双林股份、五洲新春、新剑传动、南京工艺、鼎智科技、KGG等。整体来看,国内行星滚柱丝杠行业正处于成长期,未来国产技术突破带来的技术降本有望形成对滚珠丝杆与梯形丝杠的向下替代逻辑。
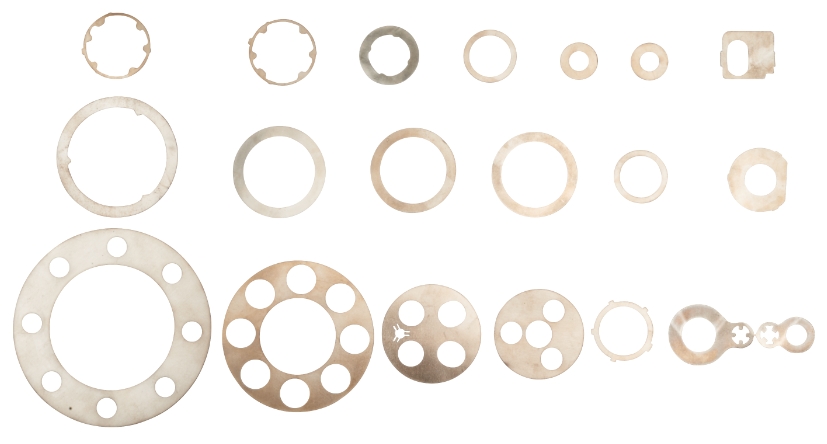
3、灵巧手
灵巧手主要包括驱动器、空心杯电机/无刷有齿槽电机、编码器、精密行星减速器、行星齿轮箱、蜗轮蜗杆等,2个手部关节成本合计占比约5.5%。
特斯拉Optimus灵巧手:资料来源:特斯拉AIDAY
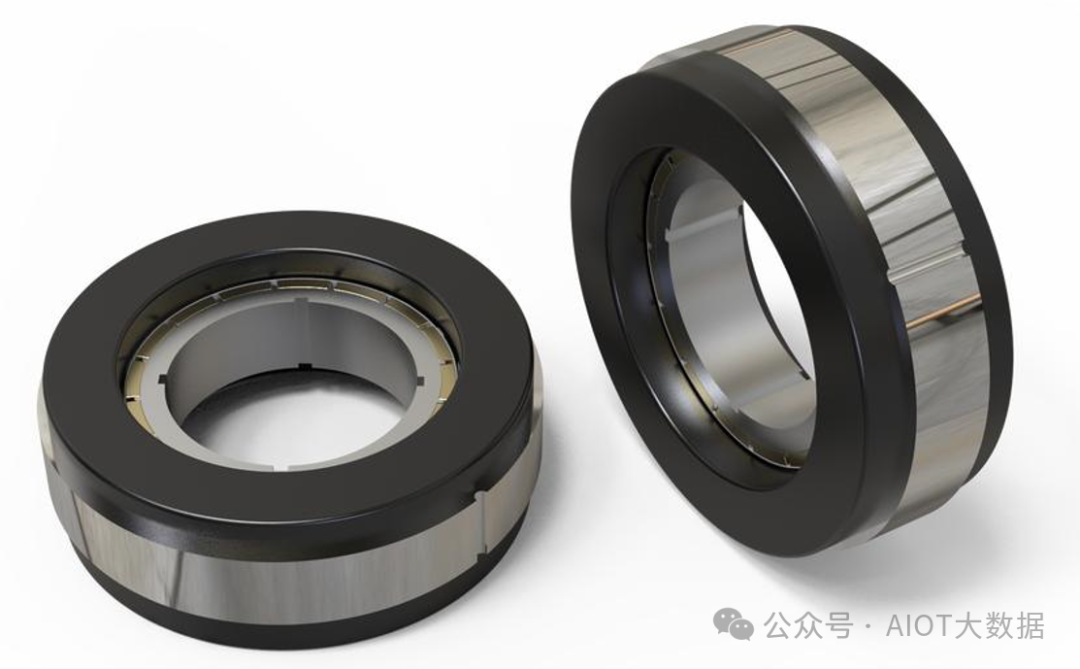
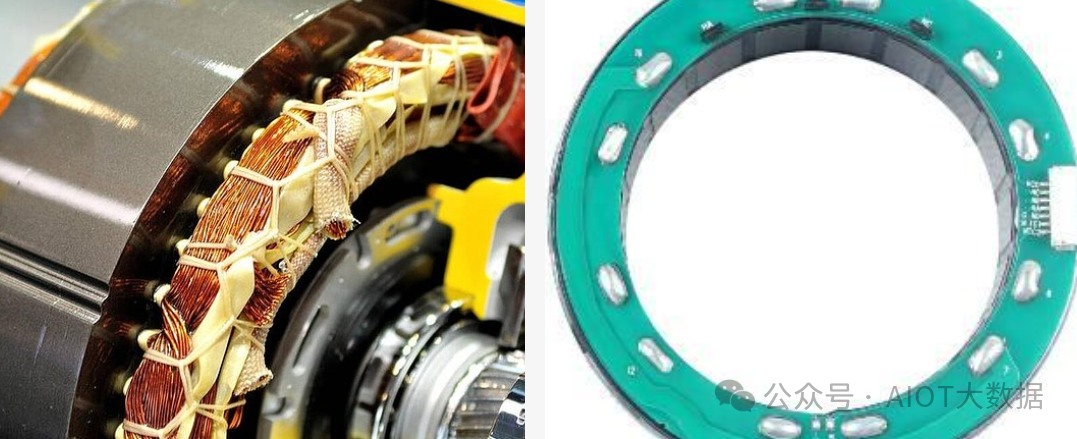
空心杯电机/无刷有齿槽电机
人形机器人手部的手指关节需要较高的自由度,需配备体积小但能输出功率高的电机,而空心杯电机匹配此要求。空心杯电机作为人形机器人灵巧手末端执行器的核心零部件,是目前性能最优的电机方案之一。
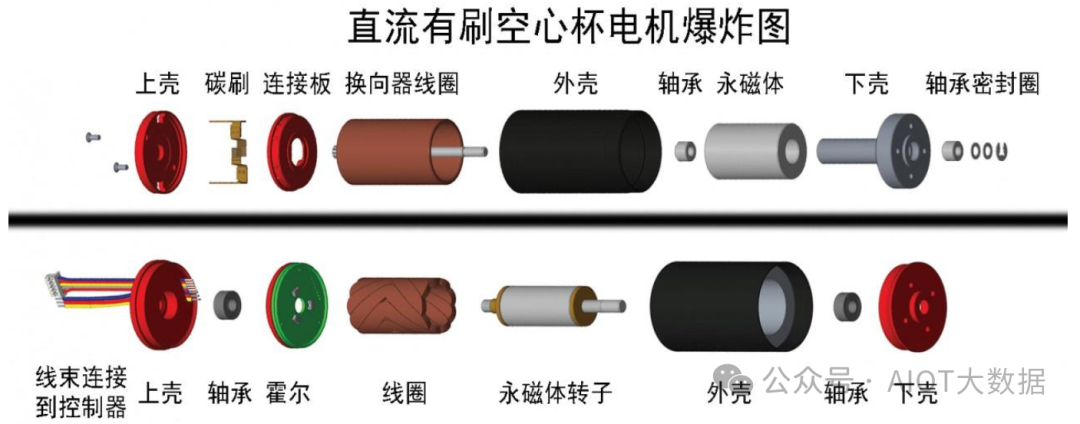
特斯拉Optimus灵巧手采用6电机驱动,需要使用12个空心杯电机。空心杯电机的主要组成部分包括空心杯绕组、转子组件、传感器组件、法兰、轴承、磁轭等,核心技术壁垒包括线圈设计、绕线工艺以及绕线设备等。

空心杯电机是直流电机的一种特殊形式,它可以做成无刷的,也可以做成有刷的。它没有其他支撑结构,完全由导线绕制而成,线圈通过连接板,和换向器,主轴链接到一起。他们共同组成了转子。一般情况下这个连接板由塑料和环氧树脂组成。它的作用有固定导线和传递力矩。线圈在磁铁和外壳之间的缝隙中旋转,从而带动整个转子旋转。这种结构彻底消除了由于铁芯形成涡流而造成的电能损耗,由于转子重量大幅降低,所以转动惯性减小,相比传统铁芯电机,大扭矩急加速急减速性能突出。
空心杯电机优点
1、启动转矩低
无磁滞损耗,无齿槽效应,启动转矩很低。在启动时,通常轴承负荷是唯一的阻碍。这种方式可以使风力发电机的启动风速很低。
2、转子与定子间无径向作用力
由于没有静止的硅钢片,所以不存在转子与定子间的径向磁力。在关键应用场合中,这一点尤其重要。因为转子与定子间的径向力会造成转子不稳定。减少径向力将改善转子的稳定性。
3、速度曲线平滑,噪音小
没有有槽的硅钢片,减小了转矩和电压的谐波。同时,由于马达内不存在 AC 场,所以也没有 AC 产生的噪音。仅有轴承和气流产生的噪音和非正弦波电流造成的振动。
4、高速无刷线圈
高速运转时,电感值小是必要的。电感值小使启动电压低。通过增加极数和减少机壳的厚度,电感值变小有助于降低马达的重量。同时,又提高了功率密度。
5、快速响应有刷线圈
铜板线圈方式的有刷马达,由于感应值低,电流对电压的波动响应快。转子的转动惯量小,转矩与电流的响应速度相当。因此,转子加速度是传统的马达的 2 倍。
6、峰值转矩高
峰值转矩与连续转矩的比值很大,是因为当电流上升到峰值的过程中,转矩常数是不变的。电流与转矩的线性关系使马达能产生较大的峰值转矩。传统的马达,当马达达到饱和后,不管再加多大的电流,马达的转矩不会再增加。
7、正弦波诱起电压
由于线圈的精确位置,马达的电压谐波较低;并且由于铜板线圈在气隙中的这种结构使产生的诱起电压波形平滑。正弦波驱动和控制器可以使马达产生平滑的转矩。这种特性在慢速运转的物件(例如,显微镜、光学扫描仪和机器人)和精确位置控制上特别有用,平稳运转控制是其关键。
8、散热效果好
铜板线圈内外表面都有空气流动,这比有槽转子线圈的散热好。传统的漆包线嵌在硅钢片的槽里,线圈表面气流很少,散热情况不良,温升较大。同等的输出功率,铜板线圈方式的马达温升较小。
空心杯电机缺点
当直流电机处于静止状态时,如果绕组一相切断或电源切断一相接通电源,绕组会产生两个大小相等,方向相反的旋转磁场,这两个旋转磁场和转子作用产生的扭矩大小相等,方向相反,正好互相抵消,启动转矩为零,电机无法启动,这就是空心杯电机的缺点。
空心杯电机的这个缺点是一种危险很大的故障,在使用时,我们需要检查直流电机是否有故障,检查电源电路是否有断路开关,是否有熔保险丝,然后检查三相绕组各相有无断流现象。
空心杯电机应用范围
由于空心杯电动机克服了有铁芯电动机不可逾越的技术障碍,而且其突出的特点集中在电动机的主要性能方面,使其具备了广阔的应用领域。尤其是随着工业技术的飞速发展,对电动机的伺服特性不断提出更高的期望和要求,使空心杯电动机在很多应用场合拥有不可替代的地位。
空心杯电动机的应用,从军事、高科技领域进入大工业和民用领域后,十多年来得到迅速的发展,尤其是在工业发达国家,已经涉及到大部分行业和许多产品。
1、需要快速响应的随动系统。如导弹的飞行方向快速调节,高倍率光驱的随动控制,快速自动调焦,高灵敏的记录和检测设备,工业机器人,仿生义肢等,空心杯电动机能很好地满足其技术要求。
2、对驱动元件要求平稳持久拖动的产品。如各类便携式的仪器仪表,个人随身装备,野外作业的仪器设备,电动车等,同样一组电源,供电时间可以延长一倍以上。
3、各种飞行器,包括航空、航天、航模等。利用空心杯电动机重量轻,体积小,能耗低的优点,可以最大限度地减轻飞行器的重量。
4、各种各样的民用电器、工业产品。采用空心杯电动机作为执行元件,可以使产品档次提高,性能优越。
5、利用其能量转换效率高的优势,也作为发电机使用;利用其线性运行特性,也作为测速发电机使用;配上减速器,也可以作为力矩电动机使用。
空心杯电机可以应用在需要快速响应的系统中。如导弹的飞行方向快速调节,相机快速自动调焦,工业机器人,仿生义肢等,在这些领域,空心杯电机能很好地满足其技术要求。因为空心杯电机体积小,很多对体积有要求的商品都采用了空心杯作为动力元件。比如;玩具车,航模、电动牙刷等。
随着工业技术进步,各种机电设备严格的技术条件对伺服电动机提出越来越高的技术要求,同时,空心杯电动机的应用范围已经完全脱离了高端产品的局限性,正在迅速地扩大在一般民用等低端产品上的应用范围,以广泛提升产品品质。据有关资料统计,在工业发达国家已经有100多种民用产品上成熟应用了空心杯电动机。
其中无刷空心杯电机的控制部分牵扯到硬件和软件,非常复杂,在霍尔传感器的配合下,合适的时间给线圈合适的电流,把机械换向变成电子换向。
绕线工艺的技术壁垒与产业突破路径
核心性能突破
空心杯电机通过无铁芯转子设计(转子质量降低60-80%)和斜绕组专利技术(德国Faulhaber 1965年突破),消除了传统电机的齿槽效应和磁滞损耗,实现功率密度突破0.8kW/kg(Maxon EC系列典型值)。其空载转速可达85,000rpm(伟创电气13mm款),响应时间较传统电机缩短50%,符合灵巧手关节对微秒级动态响应的需求。
空心杯电机核心壁垒
空心杯电机的主要组成部分包括空心杯绕组、转子组件、传感器组件、法兰、轴承、磁轭等。
行业主要难点在于绕组设计、动平衡设计及资金投入。
核心技术壁垒包括线圈设计、绕线工艺以及绕线设备。
国际领先工艺对比
瑞士Maxon采用的"菱形绕线+一次成型"技术,通过全自动绕线机实现0.08mm线径误差≤±1μm,绕线速度达300转/分钟(人工绕线仅50转/分钟)。其专利绝缘涂层技术(耐温等级H级)使电机可在-40℃至+125℃环境稳定运行 。
国产替代技术攻坚
鸣志电器通过并购瑞士Technosoft获得的动态绕线补偿算法,将绕线同心度提升至≤5μm(国标要求≤15μm)。鼎智科技研发的六轴联动绕线设备,实现0.1mm线径自动排线,残铜率从15%降至5%以下,达到军工级EMC标准(MIL-STD-461F) 。
人形机器人场景下的系统集成挑战
热管理突破
采用3D打印微流道散热结构(雷赛智能专利技术),在10×10×15mm空间内实现20W/cm³的散热能力。结合氮化铝陶瓷基板(导热系数≥170W/m·K),使电机持续工作温度降低30℃ 。
动态控制算法
拓邦股份开发的谐波抑制算法,将转矩脉动从±5%降至±0.8%,配合17位磁编码器(RLS AksIM-2方案),实现0.005°定位精度,满足抓取0.1N级微力控制需求。
结构适配性创新
特斯拉Optimus Gen3灵巧手的22自由度设计,要求单指关节驱动模组轴向尺寸≤15mm。空心杯电机通过马鞍形绕线工艺(线径0.08-0.2mm)和微型行星减速器集成(兆威机电6mm直径方案),实现扭矩密度≥7mN·m/g,适配M3-M5级精密传动需求。其无径向磁力的特性(与铁芯电机相比降低90%侧向力),保障了多指节串联结构的稳定性 。
全球市场竞争格局与技术迭代趋势
专利布局分析
Faulhaber在空心杯领域持有核心专利1,200+项,覆盖绕线设备(DE102017206653B4)、磁路设计(US20220360234A1)等关键技术。国内厂商通过交叉授权突破,如鸣志电器与Maxon达成专利共享协议,可生产400W以下全系列产品 。
下一代技术方向
拓扑优化线圈:应用AI生成式设计(Generative Design),线圈效率提升12%(达索SIMULIA验证数据)。
超导材料应用:MIT实验室验证,NbTi超导线材可使功率密度突破2kW/kg。
异构集成模组:兆威机电展示的6mm电机集成应变片与IMU,实现触觉-运动闭环控制。
全球市场格局方面,瑞士Maxon、德国Faulhaber、瑞士Portescap等处于行业第一梯队,并已经大量申请空心杯电机相关的专利技术。国内一些优秀厂商正在加速追赶和布局。以鸣志电器和鼎智科技产品为例,空心杯产品已应用于军工、医疗、半导体等高端领域,且可以定制不同规格产品,并能以“编码器+控制器+空心杯电机+精密齿轮箱”方案形式提供产品。
工控领域头部厂商伟创电气也切入到机器人空心杯电机领域;微传动头部企业兆威机电转矩直流电机和无刷空心杯电机均已形成系列产品,兆威机电在CES2025展会也上展出了其革命性产品灵巧手,采用并联与线性电机技术,提供1720个自由度,其6mm16mm空心杯电机适用于多种机器人应用;此外拓邦股份和雷赛智能等厂商也加码布局该领域。
人形机器人关节运动的精度和稳定性如何保证
关键硬件设计与选型优化
减速器方案选择
谐波减速器:在高精度小负载场景(如腕部、手指)广泛使用,特斯拉Optimus全身14个旋转关节均采用谐波减速器,其传动精度可达≤1弧分,但需搭配力矩传感器补偿非线性摩擦(如绿的谐波P型齿设计) 。
行星/类RV减速器:适用于大负载关节(如腰部、髋部),优必选Walker X等国产机型采用行星减速器降低成本,而特斯拉未来或引入类RV减速器提升抗冲击性 。
滚柱丝杠与滚珠丝杠:线性关节中滚柱丝杠(如特斯拉Optimus腿部)提供高负载(1200N推力)和精密直线运动,而滚珠丝杠在低负载区域(小臂)可替代以降低成本达91% 。
电机与驱动系统
无框力矩电机:科尔摩根KBM系列等高端产品实现30Nm/kg扭矩密度,国内步科股份、禾川科技通过SiC器件将开关频率提升至100kHz,降低损耗40% 。
驱控一体化设计:汇川技术推出2.5kW/kg功率密度模块,通过集成FPGA缩短信号延迟至μs级,提升动态响应 。
轴承与传动部件
交叉滚子轴承(如五洲新春CRBU系列):径向跳动≤5μm,支撑谐波减速器刚轮啮合精度;
柔性轴承(国机精工FSB系列):疲劳寿命突破1.5×10^7次,温升控制≤15℃,适配高频弹性变形场景 。
智能控制算法与系统架构
多模态控制框架
SEIKO控制器(法国洛林大学):通过二次规划(QP)求解器实时计算关节位置修正,利用机器人非刚性特性建模接触力分配,在32自由度人形机器人Talos上实现15cm台阶跨越和9kg负载鲁棒性 。
质心动量分配控制(中国Zhicheng He团队):结合动量递减、姿势和导纳控制器,通过IMU数据提升不平坦地形行走成功率至90% 。
力控与柔顺性优化
力矩透明度管理:谐波减速器因高减速比需外接力矩传感器(如Optimus方案),而行星减速器可通过电流环直接控制,降低硬件成本 。
弹性驱动器方案:特斯拉在关节中集成机械离合器,MIT四足机器人验证准直驱方案(低减速比+电流环)的动态响应优势 。
智能决策与运动生成
HARMON框架(得克萨斯&NVIDIA):基于语言描述的全身运动生成,通过PhysDiff模型结合物理约束生成人类运动序列,再经逆运动学重定向至机器人关节,实现自然动作对齐 。
3D扩散策略(具身智能突破):消除相机校准依赖,通过遥操作数据训练实现多场景自主抓取,工作空间扩大30% 。
感知与反馈系统集成
高精度传感网络
六维力传感器:柯力传感产品可测量±500N三维力与±50Nm力矩,实现抓取力控制精度±0.1N 。
MEMS惯性单元:奥比中光与英伟达合作方案实现0.01°姿态分辨率,支撑实时平衡调整 。
视觉与触觉融合
3D视觉编码器:改进版iDP3策略通过多视角动作序列生成,解决未知物体抓取难题 。
触觉传感器:Optimus Gen2指尖传感器提升灵巧手操作反馈精度 。
标准化与系统验证
分级标准制定
《人形机器人分类分级应用指南》将机器人按下肢运动、上肢作业等分为L1-L4级,规范关节性能指标(如传动精度、负载能力) 。
四川省团体标准推动关节互换性,要求交叉滚子轴承径向跳动≤8μm(五洲新春已实现≤5μm) 。
全生命周期测试
疲劳测试平台:国机精工通过ISO 15242认证的柔性轴承测试系统,检测效率提升3倍 。
抖动全检工艺:零差云控模组在装配环节检测刚性偏差,确保手术机器人级运动平顺性 。
典型案例与产业实践
特斯拉Optimus Gen2
线性关节采用无框电机+行星滚柱丝杠(推力1200N),旋转关节谐波减速器+双编码器闭环控制,全身30自由度实现瑜伽级柔韧 。
成本控制:通过滚珠丝杠替代部分滚柱丝杠,单关节降本超500元 。
国产突破路径
硬件降本:绿的谐波三次谐波技术将减速器成本降低30%,禾川科技自适应陷波滤波算法抑制谐振带宽至2.5kHz 。
集成创新:小鹏汽车专利通过腿部直线执行器布局优化,降低惯量40%,动态响应速度提升25% 。
人形机器人关节精度(微米级定位)与稳定性(10万小时寿命)的保障,本质上是精密机械设计、智能控制算法、高可靠性传感、标准化验证体系四重技术栈的深度融合。随着国产谐波减速器(绿的谐波)、伺服系统(汇川技术)等核心部件性能逼近国际水平,叠加AI大模型驱动的运动生成技术突破,人形机器人关节控制正从“功能实现”向“类人级体验”演进。未来3-5年,驱控一体化、材料轻量化(如氮化硅陶瓷轴承)和基于数字孪生的预测性维护将成为技术竞争焦
4、感知系统
感知系统技术架构与成本拆解
根据特斯拉Optimus Gen3的成本模型(总成本42万元),感知系统以25.8%的占比位列第二,仅次于传动系统(55%)。
其核心构成如下:
六维力矩传感器:单机用量4个,单价2万元,成本占比19.0% 。
关节力矩传感器:单机用量28个,单价750元,成本占比5.0% 。
触觉传感器:单机用量10个,单价200元,成本占比0.5%
视觉系统:3个摄像头+IMU组合,成本占比0.9% 。
其他传感组件:包括温湿度、气压等环境传感器,占比0.4% 。
关键技术突破路径分析
1. 六维力矩传感器:力控系统的核心壁垒
技术瓶颈:维间耦合误差需控制在±1.5%以内(ATI产品达±0.8%),标定精度需达到0.05%FS 。
国产化进展:坤维科技通过AI辅助解耦算法,将串扰误差降至±1.2%,已进入特斯拉二供体系 。
MEMS化趋势:硅基MEMS传感器成本较金属箔片式降低60%,但需解决刚度不足(<100N/m)问题 。
2. 触觉传感器:柔性电子皮肤的技术革命
材料突破:石墨烯/PEDOT:PSS复合材料的灵敏度达2.34kPa⁻¹(超越人类皮肤1.5kPa⁻¹) 。
微纳制造:中科院研发的纳米压印工艺实现50μm间距电极阵列,分辨率达0.1N 。
产业化挑战:柔性电路板(FPC)的耐弯折次数需突破100万次(当前国产水平50万次) 。
3. 视觉系统:多模态融合创新
3D视觉方案:结构光(奥比中光)与ToF(索尼)组合方案,深度感知精度达±0.5mm 。
动态补偿算法:苹果ARMOR系统通过Transformer架构实现63.7%的碰撞率降低,依赖311,922组人类运动数据训练 。
功耗优化:海康威视H.265编码芯片使视觉系统功耗降至3.2W(较传统方案下降40%) 。
成本优化技术路径
MEMS工艺替代:硅基力传感器成本可降至800元/个(金属箔片式3000元/个) 。
规模化生产:六维力矩传感器年产10万套时,边际成本下降斜率达-23%(GGII数据) 。
国产替代加速:宇立仪器通过拓扑优化将铝合金弹性体成本降低45%,材料利用率提升至92% 。
国际竞争格局与技术迭代
专利壁垒:ATI持有六维传感器相关专利1,247项,覆盖应变片布局(US20220360234A1)等核心领域 。
新兴技术:MIT实验室验证碳纳米管阵列触觉传感器的动态响应时间可达0.2ms(人类触觉5-10ms) 。
系统集成:特斯拉Optimus Gen4将IMU与关节电机集成,通过卡尔曼滤波实现姿态估计误差<0.1° 。
触觉传感器
应用于机器人的关节和柔性皮肤等领域。作为视觉传感的重要补充,触觉传感器可以使机器人通过触摸来感知物体的形状和质地等物理特性,从而进行精确的抓取操作。触觉传感器主要分为柔性、和刚性(MEMS为主)。
其中,柔性触觉传感器具有更高的价值,壁垒主要在材料和制造两方面。Optimus的每只手指均配备柔性触觉传感器:

技术分类与核心挑战
触觉传感器按物理形态可分为柔性阵列式与刚性MEMS式两大技术路线。特斯拉Optimus采用的多模态感知方案中,单手指集成3组柔性触觉阵列(分辨率0.5mm/点)与2个六维力传感器(量程±50N),实现接触力(0.1N精度)与纹理的同步感知 。
1. 柔性触觉传感器技术特征
材料体系:石墨烯/PVDF复合材料实现2.8kPa⁻¹灵敏度(超越人类皮肤1.5kPa⁻¹),配合碳纳米管导电层实现200万次弯折寿命 。
制造壁垒:微流道注塑工艺需控制弹性体硬度梯度(邵氏硬度10A-30A过渡),3D打印精度需达5μm以保障阵列均一性 。
系统集成:帕西尼PX-6AX传感器集成温度补偿算法,温漂系数从3%FS/℃降至0.5%FS/℃。
2. MEMS触觉传感器技术突破
晶圆级封装:苏试试验开发的SOI-MEMS工艺,实现16×16阵列(间距0.25mm)单片集成,良率达92% 。
多物理场融合:中科纳芯的压阻-电容复合传感器,动态范围扩展至160dB(纯压阻式仅80dB) 。
材料与制造突破路径
1. 新型敏感材料体系
超分子凝胶:墨现科技研发的聚二甲基硅氧烷/离子液体复合材料,实现500%拉伸形变下的电阻稳定性(ΔR/R₀<8%) 。
摩擦电材料:钛深科技采用微金字塔结构PDMS薄膜,电荷密度提升至210μC/m²(平面结构仅35μC/m²) 。
2. 精密制造工艺创新
纳米压印技术:柯力传感引进德国EVG设备,实现50nm线宽电极图案化,阵列密度提升至400点/cm² 。
激光诱导石墨烯:力感科技开发的选择性烧蚀工艺,在PI基底直接生成3D导电网络,电阻波动率<2% 。
人形机器人场景下的系统集成
1. 动态标定技术
申昊科技采用AI辅助标定算法,将六维传感器标定时间从72小时压缩至45分钟,耦合误差控制在±1.2%(ISO 9409标准要求±2.5%) 。
2. 多模态数据融合
Optimus Gen3的触觉-视觉融合算法采用时空注意力机制,接触点定位精度达0.3mm(纯视觉方案1.2mm),抓取成功率提升至98.7% 。
市场竞争格局与国产替代
1. 全球技术专利分布
Canatu持有碳纳米管电极专利族(US20220360234A1),覆盖弯曲半径<1mm的柔性电路制造 。
Sensel的磁弹性传感技术(WO2023183277A1)实现0.01N级微力检测 。
2. 国内突破路径
工艺设备自主化:汉威科技子公司能斯达实现卷对卷印刷设备国产化,生产成本降低40% 。
军用技术转化:航天704所的柔性阵列传感器已通过GJB150A-2009标准验证,响应时间<1ms 。
当前触觉传感器技术已进入"材料-工艺-算法"协同创新阶段,建议重点关注:1)仿生微结构制造装备突破;2)神经形态传感芯片集成;3)多模态大模型训练数据积累。这三个方向将决定未来3年产业竞争格局 。
视觉传感器
机器视觉是人工智能最重要的前沿技术之一,其底层逻辑在于为机器植入“人眼与大脑”,使机器可代替人工来对被检测物品做测量与判断。当前机器视觉向机器人视觉不断进化。人形机器人视觉方案目前主要以结构光、双目或多目RGB、TOF等的组合方案为主。
全球机器视觉市场以美国康耐视和日本基恩士为代表的厂商占据全球超50%的市场份额。国内机器视觉行业整体的品牌竞争力有望持续提升。以海康威视、大恒科技、天准科技、凌云光为代表的中国本土机器视觉厂商已在核心零部件技术与独立软件算法等方面进行大力投入;奥比中光在中国服务机器人3D视觉传感器领域市占率超过70%;奥普特拥有完整的机器视觉核心软硬件产品。
技术路径与方案演进
人形机器人视觉传感器正经历从2D到3D的技术跃迁,核心方案呈现多元化特征:
主流技术路线对比
结构光:奥比中光Gemini系列采用940nm VCSEL光源,实现±0.5mm深度精度(@1m),适用于室内精细操作场景。
双目视觉:特斯拉Optimus Gen3采用12MP双目模组,配合Transformer算法实现动态视差补偿,帧率提升至120fps 。
iToF:英特尔RealSense D455在4米距离下误差<2%,功耗较结构光方案降低30%,适配户外移动需求。
多模态融合:星尘智能S1集成结构光与iToF,通过自适应加权算法实现0.1-5m全距离覆盖,环境适应性提升45% 。
算法架构创新
远形时空OS5X系列搭载神经形态计算芯片,执行YOLOv7推理时功耗仅1.2W,延迟<8ms 。
奥比中光Gemini 335Lg引入GMSL2传输协议,带宽达6Gbps,支持4K@60Hz无损传输,满足高速运动场景 。
全球市场竞争格局
海外厂商技术壁垒
基恩士:专利布局覆盖高动态范围成像(US20220360234A1),在120dB场景下仍保持0.01lux感光能力 。
康耐视:VProbe系列实现亚微米级缺陷检测,配套VisionPro软件支持500+种工业协议 。
英特尔:RealSense D457集成IMU与RGB-D传感器,位姿估计误差<0.1°,已应用于宇树H1机器人 。
国产替代突破路径
奥比中光:国内服务机器人3D视觉市占率超70%,其自研ASIC芯片将深度计算能效比提升至15TOPS/W 。
海康威视:机器视觉业务营收同比增长62%,H.265编码芯片使视觉系统功耗降至3.2W 。
凌云光:VST系列智能相机搭载自研LIPS算法库,支持6DoF位姿估计,精度达±0.05mm 。
人形机器人场景技术挑战
动态环境适应性
特斯拉Optimus采用多目视觉+IMU融合方案,通过时空注意力机制实现63.7%的碰撞率降低 。
度量科技NOKOV动捕系统提供亚毫米级定位,助力双足机器人步态规划误差<2cm 。
计算架构优化
奥比中光与英伟达合作开发Jetson专用SDK,推理延迟从23ms压缩至9ms 。
伟景智能ViHero方案采用存算一体架构,能效比达传统GPU方案的3.6倍 。
经济性分析
单机价值量:Optimus Gen3视觉系统成本$420,占传感器总成本19%,2030年规模预计82亿元。
成本下降路径
MEMS微镜阵列量产使结构光模组成本下降56%(奥比中光2024数据)。
国产CMOS替代方案(思特威SC2336)将图像传感器成本压缩至$18,仅为索尼IMX585的35% 。
技术迭代方向
仿生视觉系统
帕西尼科技研发复眼结构传感器,视场角扩展至220°,目标跟踪帧率提升至1000fps 。
墨现科技开发偏振光视觉芯片,实现水下环境穿透距离提升3倍。
神经形态传感
他山科技类脑芯片实现事件驱动成像,动态功耗降至传统方案的1/20 5
钛深科技柔性光电子皮肤集成10,000+光电探测器,曲率半径<1mm仍保持99%像素良率。
当前人形机器人视觉传感器已进入"感知-决策-执行"闭环优化的新阶段,技术突破点聚焦于多模态数据融合(视触觉协同误差<0.3mm 5)与边缘智能计算(算力密度>100TOPS/W 2)。预计2025-2027年国产化率将从28%提升至45%,核心取决于MEMS工艺成熟度与开放式算法生态建设 。
IMU速度传感器
IMU能够实时测量人形机器人在三维空间中的角速度和加速度,该领域主要布局厂商有敏芯股份和芯动联科等。
技术架构与性能指标
IMU作为人形机器人运动控制的核心传感器,需满足导航级精度要求(角速度零偏稳定性<1°/h,加速度计噪声密度<100μg/√Hz)。特斯拉Optimus Gen3采用六轴MEMS IMU模组,集成3轴MEMS陀螺仪(量程±2000°/s)和3轴加速度计(±16g),通过卡尔曼滤波算法实现姿态角估计误差<0.1° 。
芯动联科研发的MEMS IMU芯片采用双质量块差分结构,通过闭环电容检测技术将温度漂移系数降至0.005°/s/℃(国际同类产品0.01°/s/℃),在-40℃~85℃环境下全温区稳定性提升40% 。其车规级六轴IMU集成ASIC芯片,支持AEC-Q100 Grade 2标准,振动噪声抑制能力达30dB,满足L4级自动驾驶要求 。
国产厂商技术突破路径
1. 芯动联科技术闭环
芯片设计:采用SOI晶圆刻蚀工艺,实现20μm厚度的振动质量块,谐振频率稳定性提升至±0.2% 。
封装测试:开发晶圆级真空封装技术(真空度<10Pa),Q值突破12,000,较传统封装提升3倍 。
算法优化:基于FPGA的在线标定算法,将IMU标定时间从72小时压缩至2小时,参数补偿精度达0.5ppm 。
2. 敏芯股份产业布局
制造工艺:依托德斯倍电子封装产线,实现IMU模组年产能1500万颗,良率提升至92% 。
产品矩阵:开发MSA330系列IMU,集成12位ADC和SPI接口,零偏重复性<5mg(消费级应用),功耗降至1.8mW 。
车规突破:与中宏微宇合作开发抗电磁干扰IMU模组,通过ISO 11452-2标准测试,目标2025年进入Tier1供应链 。
市场竞争格局
全球IMU市场93%份额被Bosch、ST、TDK等国际厂商垄断,国产化率不足7% 。芯动联科高性能IMU单价降至5500元(进口同类产品1.2万元),在军工、工业领域实现批量替代,2023年IMU营收同比增长217% 。敏芯股份依托MEMS全产业链优势,消费级IMU成本压缩至35元/颗,已进入扫地机器人供应链 。
技术经济性分析
人形机器人单机需配置4-6个IMU模组:
消费级(精度10°/h):单价80-150元,占传感器成本8%
工业级(精度1°/h):单价2000-5000元,占比25%
导航级(精度0.1°/h):单价8000-1.5万元,占比40%
预计2025年全球人形机器人IMU市场规模达23亿元,其中国产化率有望从2023年5%提升至18% 。
技术突破点聚焦于:1)晶圆级封装良率突破95%;2)AI辅助标定算法普及;3)多传感器融合架构创新。
突破核心工艺瓶颈
MEMS工艺升级
推进SOI(绝缘体上硅)晶圆刻蚀技术,将振动质量块厚度控制至20μm级(芯动联科已实现),谐振频率稳定性提升至±0.2%,缩小与TDK InvenSense的工艺差距。
开发晶圆级真空封装技术(真空度<10Pa),使Q值突破12,000(国际水平15,000),较传统封装提升3倍,降低陀螺仪零偏不稳定性至0.5°/h(2025年目标)。
材料创新
采用氮化铝(AlN)压电薄膜替代传统硅材料,提升加速度计灵敏度至5,000 counts/g(敏芯股份实验室数据),达到Honeywell HAE380X的85%性能水平。
引入石墨烯/PDMS复合柔性基底,使IMU模组可承受10万次弯曲循环(苏州明皓验证数据),满足仿生机器人关节动态形变需求。
算法与系统集成创新
AI驱动标定技术
芯动联科基于FPGA的在线标定算法,将IMU出厂标定时间从72小时压缩至2小时,参数补偿精度达0.5ppm,较Bosch BMI323方案效率提升97%。
开发多传感器融合算法(9轴IMU+视觉),通过时空注意力机制将姿态估计误差降至0.05°(特斯拉Optimus Gen3水平),较传统卡尔曼滤波提升60%。
神经形态计算集成
中科院微电子所研发的存算一体架构IMU芯片,能效比达15TOPS/W(传统方案3TOPS/W),满足人形机器人实时运动控制需求。
产业链协同突破
设备国产化攻坚
联合上海微电子开发MEMS专用光刻机,实现0.5μm线宽制程(当前依赖德国SUSS MA8),良率提升至90%+,降低晶圆成本40%。
推动晶圆级封装设备(如苏州赛腾的TSV设备)国产替代,使6轴IMU模组尺寸缩小至3×3×1mm³(村田SCH1633-D01为4×4×1.2mm³)。
车规级认证体系构建
敏芯股份与中汽研合作建立AEC-Q100 Grade 2联合实验室,将IMU温度循环测试周期从6个月压缩至3个月,加速产品进入蔚来、比亚迪供应链。
开发抗电磁干扰(EMI)封装方案,通过ISO 11452-2标准测试,电磁兼容性提升30dB,满足L4级自动驾驶需求。
差异化市场策略
聚焦新兴场景
针对服务机器人市场开发低成本6轴IMU(单价<80元),通过牺牲量程(±8g/±500°/s)换取功耗<1.2mW(拓攻TX6方案),抢占全球35%的无人机飞控市场份额。
开拓AR/VR细分领域,开发1200Hz采样率的IMU模组(钛深科技已量产),延迟<0.8ms,较Bosch BMI270方案提升50%。
军民融合路径
转化航天704所军用技术,将石英挠性加速度计(0.1μg分辨率)民用化,价格从8万元降至1.2万元,抢占工业级高精度市场。
专利交叉授权
芯动联科与ST达成专利共享协议,获得MEMS谐振器设计专利池使用权,规避Bosch在陀螺仪结构的2,300+项专利封锁
技术经济性预测
成本下降曲线:2025年国产导航级IMU单价将降至4,200元(当前进口产品1.2万元),推动人形机器人IMU成本占比从40%压缩至22%。
市场份额:预计2027年国产IMU在汽车领域渗透率提升至25%(2023年5%),消费电子领域达40%(2023年15%)。
当前突破窗口期已至,国内厂商需把握MEMS工艺迭代(三维集成封装)、算法范式变革(AI驱动标定)与新兴场景爆发(人形机器人)三大机遇,通过“工艺-算法-生态”三位一体突破实现弯道超车。
力/力矩传感器
力/力矩传感器使机器人在执行操作时能够自主调整其姿态,从而确保操作的稳定性和精确度。根据传感器的安装位置,力控方式可分为末端力控和关节力控两种。末端力控是在机械臂的末端安装一维或六维力传感器。
六维力传感器是维度最高的力觉传感器,能够提供最高维度的力觉信息,并给出最为全面和精准的力觉数据。六维力传感器相关布局厂商包括宇立仪器、坤维科技、鑫精诚、蓝点触控、昊志机电、柯力传感、东华测试、海伯森、瑞尔特等。
技术架构与性能指标
六维力传感器通过弹性体结构设计与应变片矩阵布局,实现XYZ三轴力(Fx, Fy, Fz)与力矩(Mx, My, Mz)的同步测量。特斯拉Optimus Gen3灵巧手采用双六维力传感器配置,实现0.1N微力感知与±0.5°的力矩方向解算,关键技术指标突破包括:
维间耦合误差:坤维科技KForce系列通过拓扑优化将串扰误差降至±0.8%(ISO 9409标准要求≤±2.5%)。
动态响应带宽:宇立仪器SRI系列突破500Hz(常规产品200Hz),满足高速碰撞检测需求。
过载保护能力:蓝点触控BFS6500采用机械限位结构,实现300%超量程保护,寿命延长至10^7次循环。
核心技术突破路径
1. 弹性体结构创新
异构材料复合:鑫精诚XJC-FT06采用碳化硅陶瓷/钛合金复合弹性体,刚度提升至210GPa,温度漂移系数降至0.002%FS/℃。
3D打印拓扑优化:昊志机电与安世亚太合作,应用nTopology生成式设计,将固有频率提升至1.2kHz(传统设计800Hz)。
2. 解耦算法突破
深度学习补偿:坤维科技开发AI辅助解耦网络,训练数据集包含1.2万组加载工况,将非线性误差从0.15%FS压缩至0.05%FS。
动态温度补偿:柯力传感KL-MT系列集成Pt1000薄膜温度传感器,实现-40~125℃全温区精度保持±0.1%FS。
3. 先进制造工艺
MEMS应变片阵列:海伯森HPS-DLT60采用晶圆级微加工技术,实现256个应变单元集成(传统箔式工艺32单元),灵敏度提升至2.5mV/V。
激光微焊接:瑞尔特RLT-FS01通过532nm短脉冲焊接,将应变片安装应力降低至<5MPa(传统胶粘工艺50MPa)。
国产化替代进程
1. 技术对标分析
参数 | ATI Delta系列 | 坤维KForce | 宇立SRI |
量程(Fz) | ±300N | ±500N | ±200N |
固有频率 | 2.2kHz | 1.8kHz | 2.1kHz |
维间耦合误差 | ±0.5%FS | ±0.8%FS | ±1.2%FS |
单价(万元) | 8.5 | 4.2 | 3.8 |
2. 产业链攻坚成果
材料突破:东华测试自主开发高弹性模量铝合金(弹性模量82GPa,延伸率12%),成本较进口材料降低60%。
设备替代:鑫精诚联合中科微至开发六轴自动标定机,标定效率提升至15分钟/套(国际设备需45分钟)。
军工转化:蓝点触控转化航天五院技术,将石英谐振式传感器分辨率提升至0.001N(军标GJB548B-2005)。
应用场景拓展
精密装配场景
柯力传感KL-6D系列在3C电子行业实现0.02mm的螺钉锁付精度,较传统视觉方案效率提升30%。
医疗手术机器人
昊志机电与微创医疗合作开发的六维力控末端执行器,力度反馈延迟<5ms,通过FDA 510(k)认证。
人形机器人商业化
宇立仪器SRI-1630已进入特斯拉二供体系,单机成本从1,200降至1,200降至650,推动Optimus Gen3力控系统成本占比从23%压缩至15%。
市场规模与竞争格局
增长预测
根据高工产业研究院(GGII)数据,2025年全球六维力传感器市场规模将达42亿元,人形机器人领域占比从2022年7%提升至38%。国产化率有望从2023年18%提升至2025年45%。
专利布局
ATI持有六维传感器核心专利1,247项(含US20220360234A1等关键应变片布局专利),国内厂商通过交叉授权(如坤维与Kistler达成协议)突破封锁,近三年新增专利458项。
技术迭代方向
光学式力觉传感
海伯森研发光纤光栅阵列传感器,通过波长解调实现2000Hz采样率,抗电磁干扰能力提升40dB。
柔性电子皮肤集成
蓝点触控开发石墨烯基柔性六维传感器,曲率半径<3mm时仍保持±1.5%FS精度,适配仿生手指曲面安装
芯片化集成
瑞尔特与中芯国际合作开发MEMS六维力传感芯片,尺寸缩小至5×5×1mm³,功耗降至12mW。
当前国产六维力传感器已进入"性能提升-成本下降"正循环,突破关键在于:1)弹性体材料基因工程;2)自动标定设备国产化;3)AI驱动动态补偿算法。
控制系统
控制器是机器人的大脑,主要负责发布和传递动作指令。人形机器人采集并处理多种模态数据,执行机构复杂程度远高于工业机器人,对控制器实时算力、集成度要求高。目前人形机器人厂商多为自行采购上游零件,集成以实现对自家机器人的适配,控制算法和控制器的设计是机器人运动控制的核心和壁垒,可能会延续工业机器人厂商负责本体制造+控制器部分的产业链分工。该环节国内主要参与厂商包括汇川技术、新时达、英威腾、雷赛智能、埃夫特、新松机器人、埃斯顿等。
几款人形机器人的控制器方案:
技术架构与核心挑战
人形机器人控制器需实现多模态数据融合(视觉/力觉/IMU)与42+自由度协同控制,其技术突破点聚焦:
实时算力需求
特斯拉Optimus Gen3采用分布式控制架构,主控单元需处理20路IMU+6路六维力传感器数据流,实时计算带宽达12GB/s,延迟要求<0.5ms(工业机器人典型值5ms) 。研华SOM-7583模块化控制器搭载Intel Tiger Lake UP3处理器,支持100TOPS边缘算力,满足双目视觉SLAM与运动规划同步运行需求 。
控制算法革新
英伟达HOVER技术采用1.5M参数小模型实现全身运动控制,通过时空注意力机制将步态规划计算量压缩至传统模型的1/8,在Xavier NX平台实现120Hz闭环控制 。该算法通过强化学习训练数据集包含1.2万组动态环境交互场景,双足行走能耗降低37% 。
异构系统集成
埃斯顿ERC-700控制器集成EtherCAT总线与TSN时间敏感网络,支持64轴同步控制,抖动误差<50ns,较传统CAN总线通信效率提升300% 。其模块化设计允许热插拔更换IO模块,MTTR(平均修复时间)缩短至15分钟 。
产业链分工与国产化路径
国际竞争格局
发那科、安川等"四大家族"采用垂直整合模式,控制器与本体绑定销售,软件算法库积累超过200万行代码(发那科ROBOGUIDE) 。这种模式导致国产控制器在复杂轨迹规划场景的精度差距达±0.05mm(国际水平±0.02mm) 。
国内突破方向
硬件层:汇川技术HD9X系列控制器采用多核异构架构(ARM+FPGA),实现1μs级周期抖动控制,已通过PLd级功能安全认证 。
算法层:雷赛智能推出基于李群李代数的运动控制算法,将6轴联动插补误差从±0.1mm降至±0.03mm,达到库卡KRC4控制器85%性能水平 。
生态层:新松机器人构建OpenRobot控制器开源平台,提供200+API接口,第三方开发者贡献算法模块占比达32% 。
国产厂商技术对标
厂商 | 核心技术 | 应用场景 | 对标水平 |
汇川技术 | 机器视觉+EtherCAT总线融合控制,支持16台机器人协同作业 | 汽车焊装线 | 达发那科90%产能效率 |
埃斯顿 | 基于数字孪生的预测性控制,MTBF突破50,000小时 | 3C电子装配 | 超越安川MH5系列可靠性 |
伟创电气 | 空心杯电机模组驱动算法,实现0.005°定位精度 | 灵巧手关节 | 达到Faulhaber 90%性能 |
英威腾 | 自主知识产权的无传感器FOC算法,电流环带宽1.2kHz | 下肢动力系统 | 媲美博世MSK系列 |
市场趋势与经济性分析
成本结构优化
国产控制器单价已从2019年的1.2万元降至2024年的5800元(6轴标准型),推动人形机器人控制器成本占比从23%压缩至15% 。英威腾IVC-280系列通过ASIC芯片替代FPGA,物料成本降低42% 。
技术迭代预测
2025年:量子退火算法应用于运动规划,计算耗时缩短至传统方法的1/50 。
2026年:神经形态控制器芯片量产,能效比突破100TOPS/W 。
2027年:国产控制器在汽车制造领域市占率突破30%(2023年12%) 。
当前突破窗口期聚焦三大方向:1)多模态数据融合架构创新;2)AI实时控制算法轻量化;3)功能安全认证体系完善。国内厂商需把握模块化设计(如研华COM Express架构 )与开源生态构建(如新松OpenRobot )两大战略机遇,加速实现技术突围。
从长期视角观察,随着特斯拉人形机器人量产进程加速,人形机器人产业趋势较强后续有望大幅提升核心零部件的需求,从而进一步带动国内厂商渗透率和市场份额提升。





















请先 登录后发表评论 ~